スペクトラムアナライザで遊んでみた話
スペクトラムアナライザーといえば、憧れの測定装置です。
電気信号に含まれる周波数をグラフ化してどの部分の周波数が強いとか、
ノイズが含まれてそうだ。とか分析する装置になります。
それでですね。
今まで知らなかったんですけど、パソコンでスペクトラム分析ができるソフトが有るって。
例によってyoutubeによって知らされたわけです。
waveGeneとwaveSpectraになります。
もう古いみたいで、欠片を集めるのに苦労しましたが、
必要なものはタイムマシーンの中にありました。
上記キーワードを駆使して探してみてください。
なお、この記事は2024年5月ぐらいに書いていて、今はもう少し探しやすいみたいです。
インストールしたのは古いノートパソコンで、PanasonicのSX3ですね。
こちらにソフトを入れていろいろ試してみました。
スペックはIntel4世代Core5の8MにSSD200G入ってます。
これでも、災害用受信機、インターネット、文書作成、VTR録画編集、オシロスコープ等など
うちでは現役でやっています。Windows10のままずっと使う予定。
まず基本的な流れですが、
waveGeneで音声信号を生成して、
waveSpectraでその信号を分析します。
waveSpectraで分析するのはなんの信号でも構わないのですが、
今回はアンプとか、スピーカーとかの特性を見たいなーと思いますので、
基本的に以下の構成を取ります。
waveGene→測定対象機器→waveSpectra
具体的には
PC(waveGene)オーディオ出力から信号を取り出し
→ アンプ → スピーカー → マイク
→PCのオーディオ入力へ信号を入力
→PC(waveSpectra)
waveGeneで20Hzから20KHzまでの信号を生成して、
測定機器を通して 出てきた信号をwaveSpectraで分析するという流れですね。
実際に測定してみましょう。
[1]
まずは測定機器を何も挟まないで
waveGene→waveSpectra
ノートPCのオーディオ出力をオーディオ入力へ直接接続します。

フラットですね。
すべての周波数が一直線で同じレベルになってます。
次はアンプの特性を測っていきます。
[amp直結]
waveGene→アンプ→waveSpectra
ノートPCのオーディオ出力→アンプ→オーディオ入力へ直接接続します。
このアンプは秋月のキットの入力段に3経路のミキサーを接続したものです。
ミキサーは独自設計なのでこれが悪さしている可能性あります。
特に0.1μFのコンデンサーとかもうちょっと大きくしたいです。
https://miha.jugem.cc/?eid=323
それでも、わりとフラットですね。それでも50Hz以下とか500Hz以上の部分で徐々に下がっていきますね。
実用上問題ないと思いますので、この特性を頭に入れて他のも見ていくことになります。
■スピーカーとマイクを繋いでいきます。
waveGene→アンプ→スピーカー→空気→マイク→waveSpectra
スピーカーとマイクという新しい要素が出てきましたね。
この2つの要因で色々と変わってくるはずなので、
いろいろ試したいと思います。
これ以降で空気が間に入るものはスピーカーから約30cmの距離でマイクで拾っています。
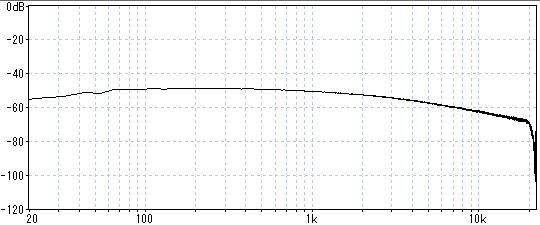
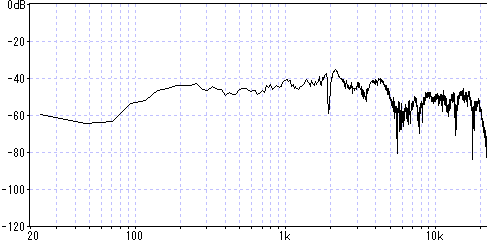
[sp-usb]
waveGene→自作アンプ→自作スピーカー→空気→USBマイク→waveSpectra
USBマイクですが、電話会議用にamazonで1000円ぐらいで購入したものです。
スピーカーも自作のため
https://miha.jugem.cc/?eid=84
こちらです。昔秋月でF77G98-6といういい音がなりそうなスピーカーを300円ぐらいで買って
木で枠を作ったものですね。
2000Hzが急激に下がっているのが少し気になりますが、
周辺の周波数でカバーするので問題にはなりません。
1Khzを中心にして上下-10dbぐらいで比較します。
下は200Hzから上は8000Hzまでが範囲に入ります。
結構フラットな数字が出ています。
下は2000Hzをピークにして徐々に下がります。100Hzでは-20dbぐらい下がります。
上は8000Hz以上が減衰が激しいです。
そこから上は、10000KHzで-40dbぐらいになってしまうのでそこまでは仕様の範囲外と思われます。
USBマイクで上をカットしているのか、
そもそも、スピーカーから音が出ていないのか?
この段階では判断は難しいです。下記※1参照
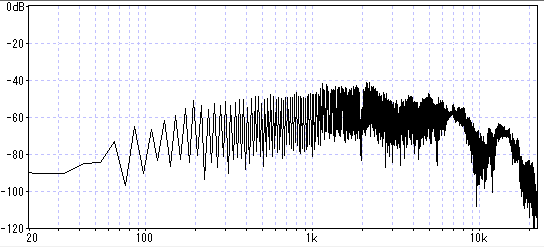
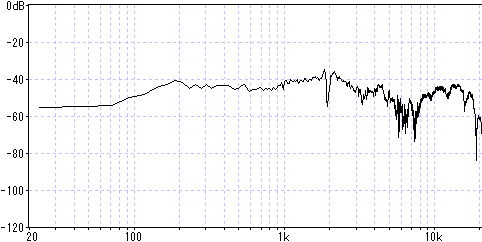
[sp-cnd]
waveGene→自作アンプ→自作スピーカー→空気→秋月コンデンサーマイクキット→waveSpectra
同じスピーカーでマイクを変更していきます。
秋月の高性能マイクアンプキット
https://akizukidenshi.com/catalog/g/g105757/
「高性能」の一言に釣られて買ってきて
電話会議用に電池と組み合わせて一つ作っていたものです。
これだけ-20dbの所で拾ってしまった。マイクの感度高すぎ。
同じように1Khzを中心にして上下-10dbぐらいで比較していきます。
下は20Hzから上は8000Hzまで範囲に入ってきます。すごいフラットですね。
9000Hzから減衰が激くなりますが、アンプの周波数特性を考慮すると
15000Hzぐらいまで実用の範囲となります。
※1
この結果を踏まえてもう一度[sp-usb]の結果を振り返ると、
アンプからは音が出ていて、スピーカーからも音が出ている。
1000円のUSBマイクが上の周波数をカットしているか何らかの理由で
拾えていないと判断します。とは言っても会議用マイクでは
不要な周波数ですから、理にかなっているし実用の範囲です。
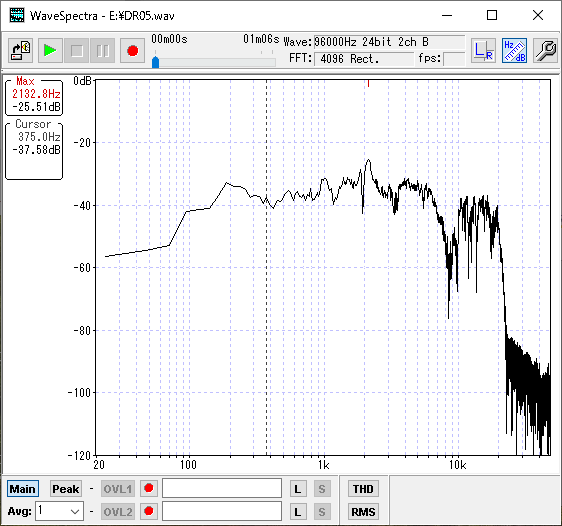
[sp-DR05][sp-DR22WL]
waveGene→自作アンプ→自作スピーカー→空気→TASCAMのDR-05でwaveファイル保存→waveSpectra
waveGene→自作アンプ→自作スピーカー→空気→TASCAMのDR-22WLでwaveファイル保存→waveSpectra
今度はリニアPCMレコーダーのTASCAMから2種 DR-05とDR22WLです。
スペックは似たような感じですね。
DR22WLの方が古いんですけど、スマホから遠隔操作できたり、
ファイルを取り出したりできるのは便利ですね。
次世代のX付きの機種からはPCにUSB接続した状態でマイクとして機能するそうです。
そうするとメモリーカードを経由せずにPCにへ直接取り込めるので便利ですね。
機器の設定で下の周波数をカットする機能が有りますがOFFの状態です。
録音設定は24Bitステレオ96KbpsWAVとしています。
2つ同時に出します。
DR05
DR22WL
基本設計が同じだから?なのか、同じ特性を示しています。
まず、2000Hz、5500Hz、7500Hzの所で極端に落ち込みますね。
原因がわかりませんが、筐体の形から来るものか?
それとも、回路やパーツから来るのかわかりませんけど、
兄弟の持つ特性と考えて良いのかもしれません。
この落ち込みは周囲のほか周波数でカバーしているはずなので、音質に大きな影響は無いです。
他と同じように1Khzを中心にして上下-10dbぐらいで比較していきます。
下は90Hzから5000Hzまでは範囲に入っています。非常にフラットですね。
90Hzから下の方はノイズを拾わないような仕様にされている可能性ありですね
5000Hzから上は20000Hzまで-20dbの範囲になりますので、アンプの特性を考慮すると
ほぼフラットで問題ないですね。
[sp-AquosSense6]
waveGene→自作アンプ→自作スピーカー→空気→スマホAquosSense6でwaveファイル保存→waveSpectra
上記のTASCAMと同じようなものを比較したいと思い、
手持ちのスマホで同じ実験してみました。
スマホで録音するアプリとして「PC録音」というソフトをインストールしました。
これでwavファイルに48Kbpステレオで録音しました。

他と同じように1Khzを中心にして上下-10dbぐらいで比較していきます。
180Hzぐらいから2000Hzまでフラットです。その上が減衰ひどくなりますが、
20000Hzまでぎりぎり-10dbの範囲になりますので、アンプの特性を考慮すると
ほぼフラットで問題ないですね。
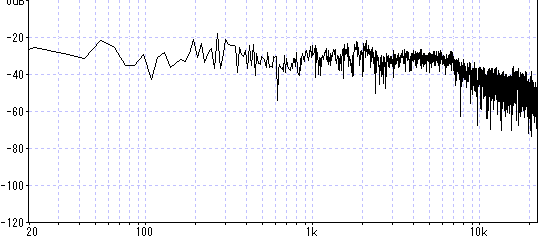
[notepcSP-usb]
waveGene→ノートPC直付けスピーカー→空気→USBマイク→waveSpectra
USBマイクは上でも使用したもので、
電話会議用にamazonで1000円ぐらいで購入したものです。
今回はスピーカーの違いとして
ノートPC内臓の小さいスピーカーです。
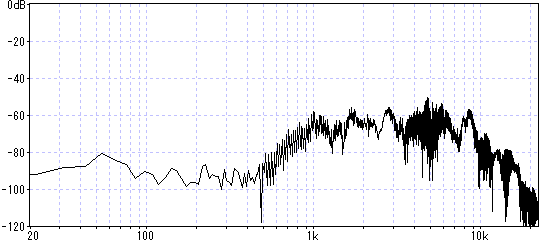
すごい極端ですね。ノートPCのスピーカーのため、小さいので低い部分の減衰がひどいです。
上は8000Hzまで出ているようですが、とてもフラットとは呼べないです。
総合的にノートPC用スピーカー以外ならば
どの組み合わせでも問題ないレベルで録音あんど再生出来る。
TASCAMに関しては文句なしの高性能です。
その他の機能がいろいろ有りますし、単純に比較できない部分もあり、
何と言っても持っていると格好が良いので所有する満足感がすばらしいです。
スマホのAquosSense6が意外と健闘していてびっくりですね。
実用上問題ありませんので、TASCAM陣営としては脅威なのではないでしょうか?
ステレオ対応とか、いろいろな便利機能がアプリに搭載されると面白いかもしれません。
ただし、音質的なものは機種によってばらつきが大きい可能性もあり。
マイクで周波数特性という意味では秋月の高性能マイクアンプキットが高性能でした。
スピーカーの差という意味ではPC内蔵スピーカーと
秋月購入のF77G98-6に箱つけたものしか実施していないのでいろんなバージョンでテストしてみたいですね。
今後の課題になりそうです。
スピーカーとの距離が今回は30cm固定ということで
近すぎる気もします。
仕事をしながら卓上で効く分にはこの距離でも良いんですけど、
オーディオという意味だと、1m以上かな~と・・・
という事で課題を残しつつ、基礎データが取れたので、
これを基準値として発展していけるとうれしいです。