ESP32のULPでI2C通信(BMP180)mycropython版
ESP32のULPで実行する記事
https://miha.jugem.cc/?eid=409 で、
ESP32のULP紹介、GPIO入力、GPIO出力、ADC入力をやってみた。
これにI2Cが使えるようになると便利だなーと思い。挑戦し成功した記事です。
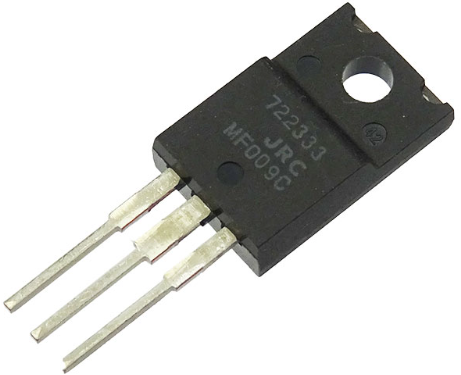
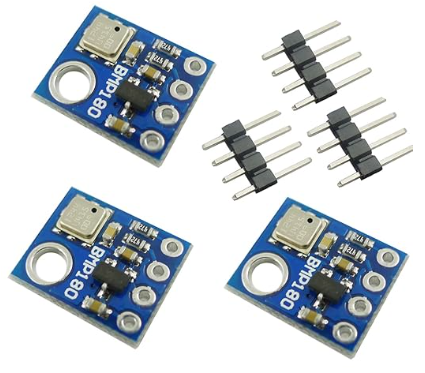
I2Cのセンサーとして選んだのが
BMP180という温度と気圧が取得できるセンサーだ。
BME280より安いかなーと思いましたのでULPで温度と気圧を取得してみました。
今回の元にしたプログラム
プログラムの仕様
表示例
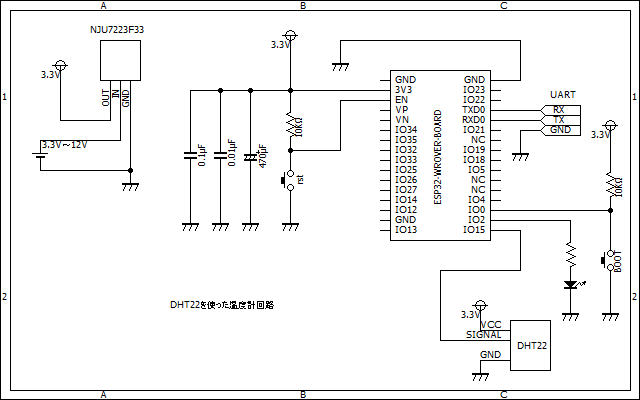
接続
プログラム
こちらからダウンロードできます。
https://drive.google.com/file/d/1UnT5i8G1GwxzGrEtb9N8IAs8-kNProBp/view?usp=sharing
#
VERSION_STR="ULP-BME180-R2"
import sys
import time
import math
from esp32_ulp import src_to_binary
def end():
time.sleep(1)
print(VERSION_STR)
def k(n) :
#
#ULP実行ファイルのメモリ上にロードされるアドレスと実行開始アドレス
#ULPプログラム
#define DR_REG_RTCIO_BASE 0x3ff48400
#define RTC_GPIO_OUT_REG (DR_REG_RTCIO_BASE + 0x0)
#define RTC_CNTL_STATE0_REG 0x3FF48018
#define RTC_CNTL_LOW_POWER_ST_REG 0x3FF480C0
#GPIO32------------------------------------------
#20 * 4 = 80byte
#3 * 4 = 12
# GPIO32 input mode
//DEBUG
// GPIO2 LED ON
psr l00010
// GPIO2 LED OFF
/* wake up after significant change */
wakeUp:
#
/* Wake up the SoC, end program */
waitNext:
// Compute abs value of R0
////////////
#define BMP180_ADDR 0x77
#define BMP180_COMMAND_TEMPERATURE 0x2E
readBMP:
// Wait 5ms for sensor computation
// Read 16 bit result
// Read raw pressure
// Wait 8 ms for sensor computation
move r1,BMP180_ADDR
move r1,BMP180_ADDR
ret
fail:
// Read calibration data
// Wait for r2 milliseconds
////////////
write_intro:
ld r2,r3,20 // Address
ld r2,r3,16 // Register
write_b:
psr l00280
move r2,0 // Ok
ld r2,r3,8 // data byte 1
jump write_b
ld r2,r3,16 // Address
ld r2,r3,12 // Register
psr l00340
ld r2,r3,16
ret
read8:
move r2,1 // last byte
psr l00380
pop r0
move r2,0 // OK
read16:
move r2,0
move r2,1 // last byte
psr l00420
pop r0
move r2,0 // OK
////////////
i2c_started:
i2c_didInit:
i2c_start_cond:
// Repeated start setup time, minimum 4.7us
not_started:
// SCL is high, set SDA from 1 to 0.
ret
set_SCL
// Stop bit setup time, minimum 4us
// SCL is high, set SDA from 0 to 1
move r2,i2c_started
ret
// SDA change propagation delay
clock_stretch_write:
// SCL is high, now data is valid
// Clear the SCL to low in preparation for next change
ret
clock_stretch_read:
// Wait for SDA value to be written by slave, minimum of 4us for standard mode
ret // bit in r0
// Write a byte to I2C bus. Return 0 if ack by the slave.
psr l00440
pop r0
move r0,r2
ret
#
X1 = int(ac3 * B6) >> 13
if (B7 < 0x80000000) :
p = p + (int(X1 + X2 + 3791)>>4)
###########
#DEBUG
#ULP
print("machine.reset_cause() -->", machine.reset_cause())
if machine.wake_reason() != 6 :
print("prep start")
display()
#ULP割り込みON
#
#以下はDEBUG deepsleepを外すと走る
old = 0