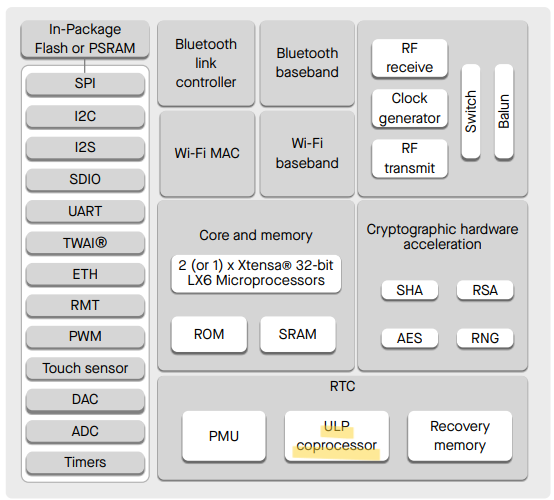
ESP32の超省電力処理装置=ULPのプログラムが判った
ULPとは「Ultra Low Power」の略で、日本語では「超低消費電力」です。
google先生によると以下な感じですね。
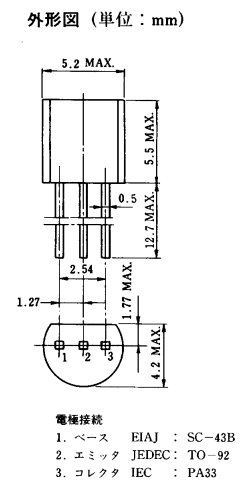
スペック:
当方、C言語もたしなみますが、mycropythonから使ってみたいので、色々調べました。
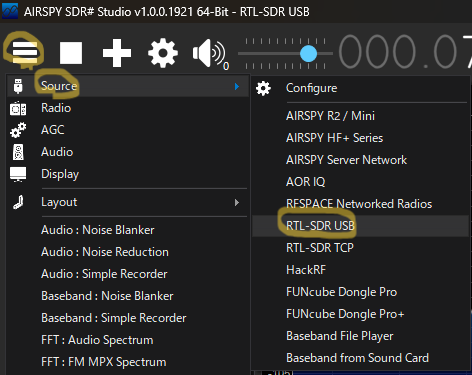
ESP32のmycropythonに標準で付いてくる
from esp32 import ULP
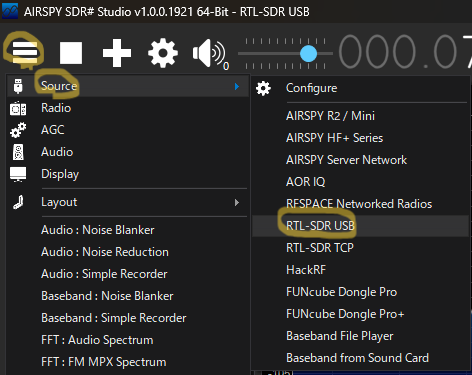
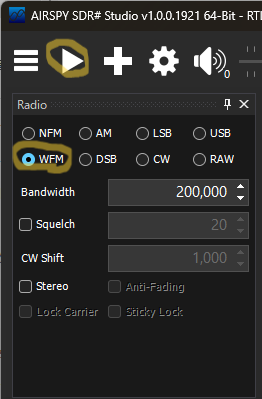
サイトにインストール方法も書いてましたが、
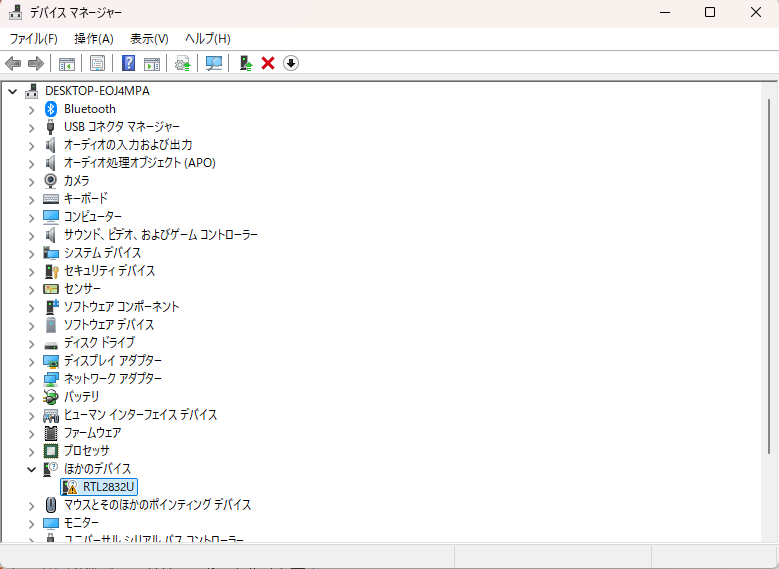
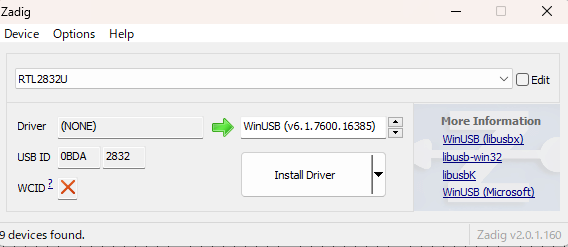
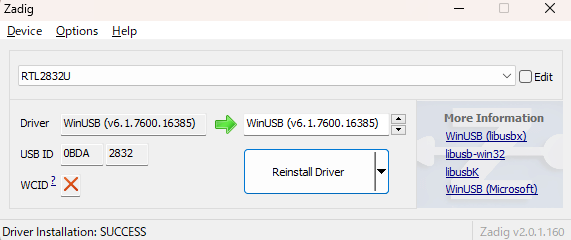
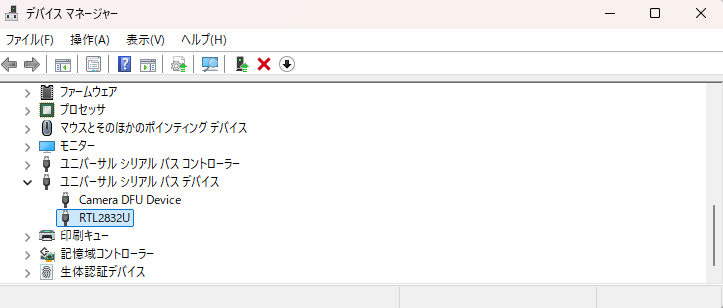
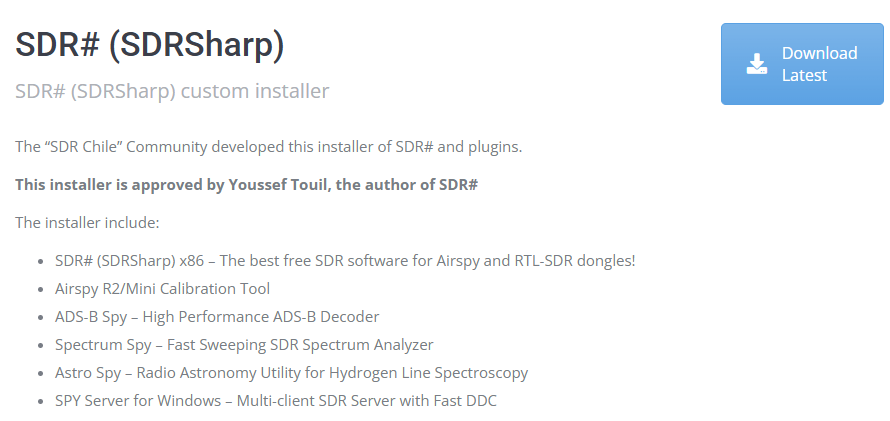
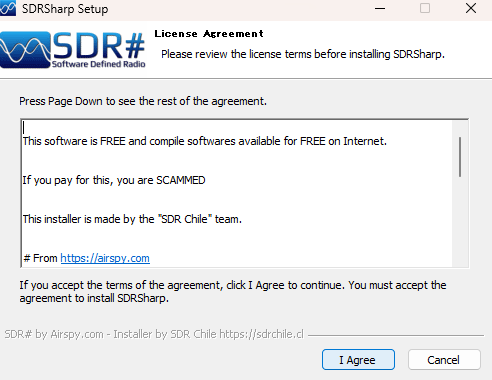
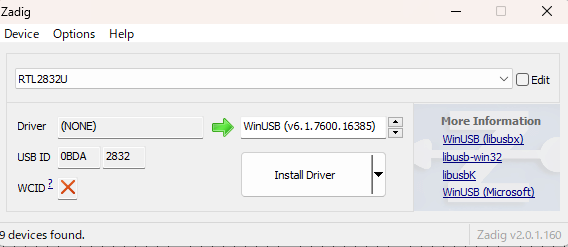
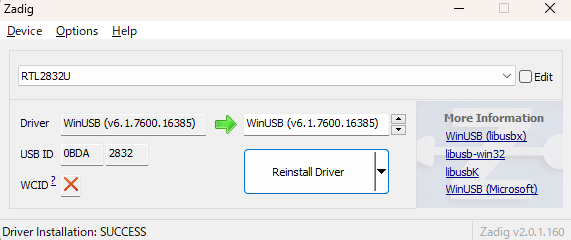
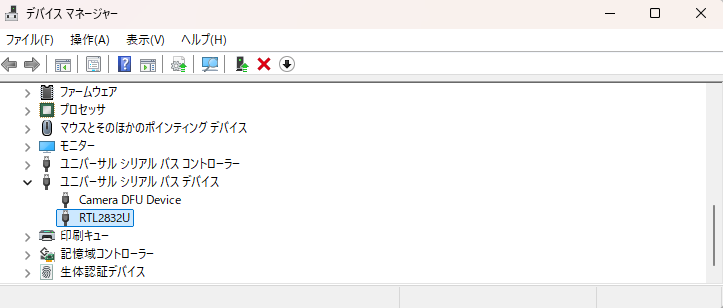
環境構築
下記URLからダウンロード
これで、mycropythonから呼び出し可能です。
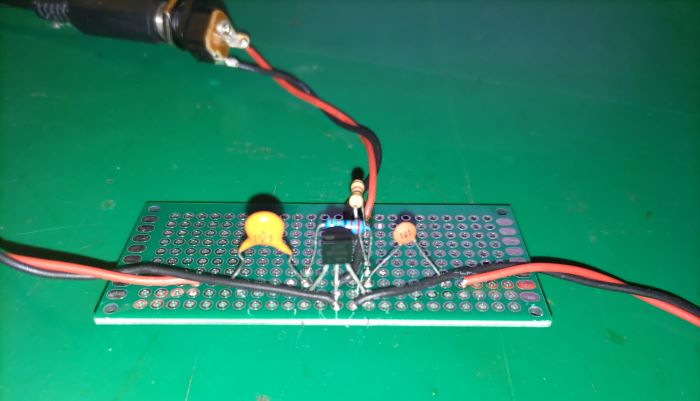
さっそくLチカ
プログラム
from esp32 import ULP
after_init:
on:
off:
exit:
簡単なものだけ上げておきます。
sub r1, r2, r3 // R1 = R2 - R3
あっちこっちの説明にrtcって書いてるのはULPの事。
マクロの定義は追加で出来ないらしく、push、pop、ret、psrなどを使った
GPIOの番号が普通のC言語とか、mycropythonでやってきたものとは
その他にも、外部レジスタが何種類も有り、
おまじない(外部レジスタに設定するためのマクロ)全部ではない
#本体復帰可能か確認 可能ならr0に1が返る
#ULPタイマー停止
上記のRTC_xxな定義はC言語ならヘッダーインクルードすれば良し。
おまじないの定義
WRITE_RTC_REG/READ_RTC_REG等のパラメータの探し方
https://github.com/pycom/esp-idf-2.0/blob/master/components/driver/rtc_module.c
GPIO番号の変換
GPIO毎の初期化一覧
GPIOと値の変換
レジスタと数字の変換
RTC_IO_TOUCH_PAD0_MUX_SEL_M部の変換
レジスタの情報
以下はよく使うと思われるポイントをまとめてみた。
deepsleep中にULPからの割り込みで本体復帰
mycropythonではesp32.wake_on_ulp(True)をやってからdeelsleepします。
ULPでは本体復帰可能かを確かめて、可能=1ならwakeを行う。
GPIOからアナログ(ADC)入力
mycropythonでADCを初期化しておく
https://drive.google.com/file/d/1qiiXNS387NZzNazFAt0WiogwVG5Z2qiZ/view?usp=sharing