日本の目指す自動運転、高精度3Dマップを前提する自動運転のロードマップはこれで良いのか?
テスラの目指す自動運転と比較検討してみます。
■テスラはなぜ超高性能なコンピューターを搭載するか?
以前‟ディープラーニングと自動運転は宝の山?”に書いたNVIDIAのDrivePX2は、アップルのMacbook Pro 150台分の能力だとのこと。
しかしテスラの車載コンピューターがNVIDIAを使用したのはHW2.5まで。HW3.0(2019年第3四半期以降)では、NVIDIAのAIチップの21倍の能力のAIチップを自社開発し搭載されました。
しかもこれと自動運転用のセンサー類は、現在生産されている全てのテスラ車に搭載されています。

出典:テスラの電子プラットフォーム、トヨタやVWより6年先に理想形
これは完全自動運転用で、テスラの戦略目標は自動運転レベル3、レベル4ではなく、レベル5を目指します。そして、そのためにはレベル3やレベル4とはけた違いに高性能な、走りながら学習するAI車載コンピューターが必要になります。
■レベル3、レベル4は条件限定、区間限定、地域限定
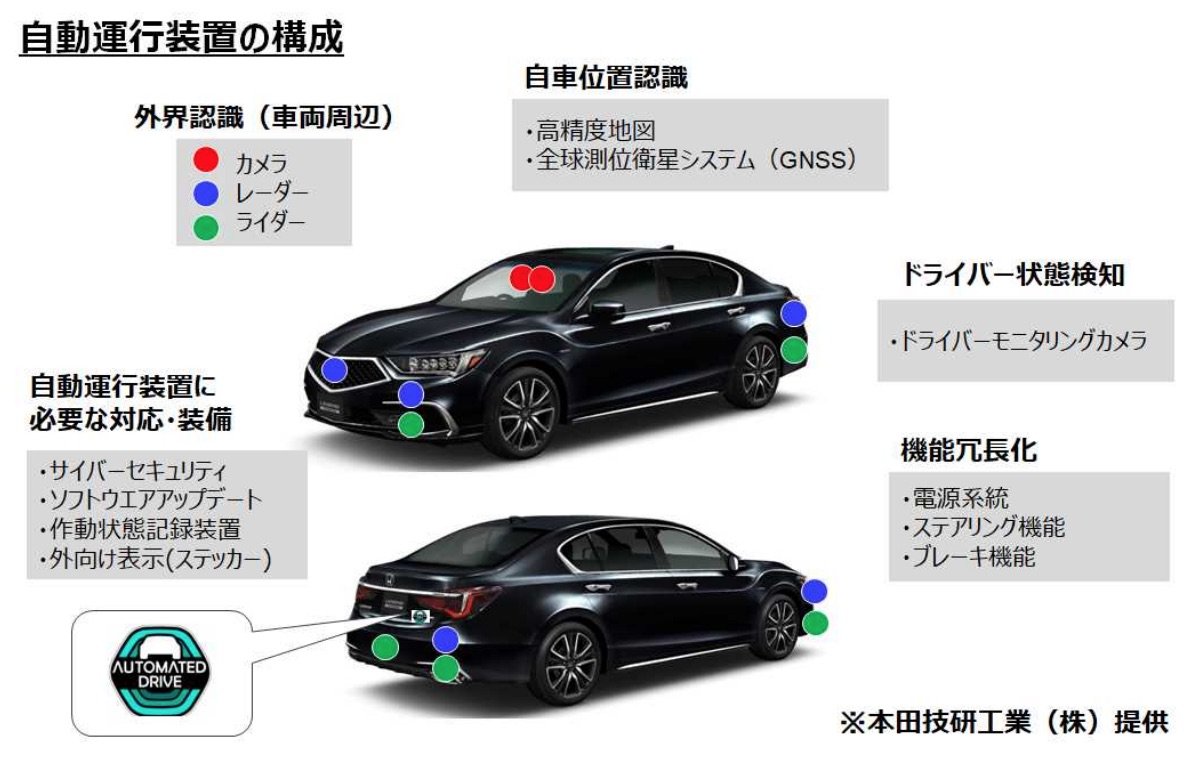
世界初の自動運転レベル3とマスコミが大々的に取り上げているホンダレジェンドですが、どのような条件下で自動運転が出来るか見てみましょう。
以下引用
前略
トラフィックジャムパイロットは、一定の条件下でシステムがドライバーに代わって運転操作を行うことができる。システムが作動する主な走行環境条件としては、下記のようなものがある。
- 高速道路と、高速道路に接続する自動車専用道路
- 除外区間は中央分離帯などによって自車線と対向車線が分離されていない区間、急カーブ、サービスエリアやパーキングエリア、料金所など
- 強い雨や降雪による悪天候、視界を妨げる濃霧、強い日差しの逆光などにより、自動運行装置が周辺環境を認識できない状況ではないこと
- 自車が走行中の車線が渋滞か渋滞に近い混雑状況であり、前走車や後続車が車線の中心付近を走行していること
- 自動運行装置の作動開始前に自車の速度が時速30km未満であること、作動開始後が時速50km以下であること
- 高精度地図とGNSSによる情報が正しく入手できていること
- 運転者が正しい姿勢でシートベルトを装着していること
- 運転者がアクセル、ブレーキ、ステアリングなどの運転操作をしていないこと
以下省略引用終了

■高精度3D マップ
それでは高精度3Dマップとはどのようなものか?

以下引用
高度な自動運転の実現には、正確で精密な地図データが必要となる。たとえば片側2車線以上の広い道路を走るのであれば、今、自車がどのレーンを走っているのかを把握できなければ、レベル3以上の自動運転は不可能だ。しかし、従来からあるカーナビ用の地図データには道路の車線のような細かいデータは含まれていない。そのため、高度な自動運転には、専用のより詳しい地図が必要となるのだ。
そうした自動運転時代に求められて生まれたのが、3D高精度地図データだ。道路の幅にはじまり、車線を分ける区画線や路肩の線、信号での停止線、横断歩道、標識などが詳細に記されている。3Dとあるように平面ではなく、立体的なデータになっているのも特徴だ。高精度三次元地図データと呼ばれることもある。

高速道路JCTの整備イメージ
この3D高精度地図データを生成するには、非常に手間がかかる。カメラやスキャナなどを満載した車両で、実際の道路を走行して測定し、そのデータを加工して作るのだ。一方で、道路は工事で形を変えることも頻繁にあるし、新しい道路ができることもある。そのため一度できたら完成ではなく、延々と修正を続けることになる。つまり維持することも大変なのだ。
そうした手間のかかる3D高精度地図データを、各自動車メーカーがそれぞれ行なっていては効率が悪すぎる。そのため日本においては、トヨタをはじめとする自動車メーカー10社(いすゞ、スズキ、スバル、ダイハツ、トヨタ、日産、日野、ホンダ、マツダ、三菱)を含む計18社が、2017年にダイナミックマップ基盤株式会社を設立。このダイナミックマップ基盤株式会社が、オールジャパンの代表として自動運転用の3D高精度地図データを整備し、提供することになったのだ。
ダイナミックマップ協調領域
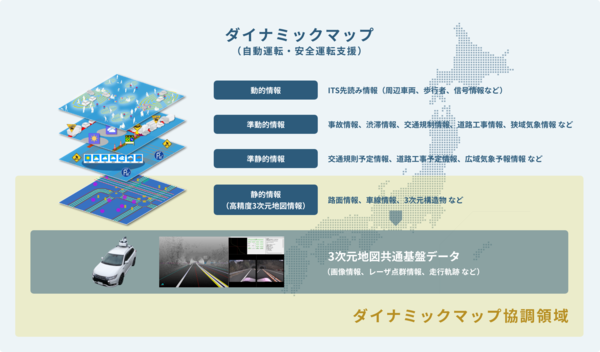
ただし、リアルな自動運転を行なうには、3D高精度地図データだけではまだ不足だ。これに時々刻々と変化する信号情報や事故渋滞など、動的に変化する情報も必要となる。そのため、3D高精度地図データという静的なデータに、動的データをプラスした「ダイナミックマップ」と呼ばれるデータが、実際の自動運転には使われている。
そのダイナミックマップの概念は4階層からなっている。路面情報・車線情報・建物の位置情報といった3次元地図情報である「静的情報」と、交通規制の予定や道路工事予定・広域気象予報情報等の「準静的情報」という2つの静的情報。これに、事故情報や渋滞情報・交通規制情報・狭域気象情報等の「準動的情報」と、周辺車両・歩行者・信号情報といったリアルタイムの「動的情報」という2つの動的情報を重ねて4層にしたものがダイナミックマップとなるのだ。
以下省略 引用終了
こちらもどうぞ
どうですか?
これを読んだだけで「広範囲で限定条件の無い自動運転」は無理だという気がしませんか?
非常に手間のかかる3D高精度地図データに加えて、刻一刻変化する動的情報も必要となると、対応できる道路は限定されますし、動的情報を提供するためのインフラ整備も大変です。
そではテスラはどうかというと高精度3Dマップを必要とせず、カメラの映像からAIが判断して走行するビジョン方式です。
なおテスラは昨年11月から選択されたユーザーに対してFSD(Full Self Driving)のベータ版をリリースしています。これは名目上はレベル2で、ドライバーの監視のもとに走行していますが、実質はかなり完全自動運転に近いキャパビリティがあるようです。
そしてテスラにはすでに数十億kmの走行データがあると言われますが、AIで学習しながら走行したデータはOTA(Over The Air)でテスラ社のサーバーに送られ、コンピュータープログラムはUpdateされバージョンアップします。
以前紹介した動画はBeta7.1でしたが、今回紹介する動画はBeta8.1にアップデートされており、大分走り方がスムースになっているようです。
なおスピード表示はマイル/時なので、㎞/時には1.6倍してください。
テスラ車の車載コンピューターは自動運転していない時もシャドーモードで作動しており、データはテスラ社に送られています。
そしてFSD(Full Self Driving)はバージョンアップされ、OTA(Over The Air)で無線アップデートされます。
こうやってテスラと日本政府、日本社の戦略を比べると、このまま突き進んだのでは負け戦となるとしか思えません。早々に戦術転換する必要があると思いますが、それはまた難しそうです。