先日は、
の記事にてブレについて書きました。ブレには、
■ 手ブレ
■ 被写体ブレ
がありますが、これを使うと
■ 花火
■ 滝
のように時間単位の座標の推移を平面上に再現することが出来ます。写真の場合、ハイスピードシャッターにすると、動きが止まるので、座標平面上の 【 座標 】 の取得と同じ状態になりますが、スローシャッターにすると時間単位の推移の状態が再現されるので、 【 関数の実行結果 】 のような座標の集まりが発生します。この状態を再現すると線分になるわけですが、小学校六年生算数で登場する比例や中学校の数学で登場する関数のグラフのように法則性を持った形で再現される線分が発生します。
関数の場合 【 変数xの値の推移 】 によって関数の実行結果である変数yの値が変化しますが、現実世界の現象を人が感覚器官で検知した場合にはニュートン力学が基準となっていますから、多くの法則性を見てみると微分要素が含まれており、 【 時間単位の仕事量 】 で再現することができるようになっています。これを運動エネルギーなどの物理ではなく、位置情報である 【 座標の推移 】 として考えると、 【 速度の単位 】 と同じ形になるので 【 時間単位の移動距離 】 で示すことが出来るようになります。
写真の場合、定点でカメラを固定した場合、全ての座標が確定した状態で状態の記録が始まりますから、そのフレーム内にオブジェクトが存在する場合には、空間内に配置された状態になっています。
つまり、任意の場所に原点が存在した場合、そこからの距離が生じているので個別のオブジェクトは見えている場所に存在しているわけですが、この時の位置関係は
【 原点からの距離 】
なので、グローバル座標で指定されていることになります。
この状態で動かないものの場合、移動距離が0なので、グローバル座標で指定された位置が変化しないので座標が定数で固定されているわけですが、動体の場合だと時間単位で動いているので、グローバル座標で指定した初期の座標に対して何かしらの関数で動きを加えた状態になっています。
これが動体ですから、現実世界では、ユークリッド空間上における座標の変化を何かしらの法則性に基づいて実行している状態になります。
この変化が 【 日常で目視している現実 】 になりますが、写真は絵画と同じように 【 平面上の出来事として状態を刻む物 】 ですから、空間上の情報を平面上に落とし込む必要があります。この場合、
■ 平面的な移動
■ パースによる奥行きの変化
と言う形で座標の変化が生じるので、立体を平面にした場合には、図形的には2.5Dになるので、三次元に対して次元削減を適応して二次元化し、座標平面上での位置関係の指定を行うようになっており、奥行き方向の変化を幾何の寸法たパースで作成したグリッドを基準とした状態変化で再現することになります。これが絵を描く時の変化になりますが、ハイスピードシャッターを用いて撮影した場合には座標の取得になるので状態のみを記録するので、状態を構成する平面的な状態が写真で記録されるわけですが、この際の記録は二次元の状態の記録になります。
しかし、スローシャッターを用いた場合だと、関数のグラフのように座標の推移が記録されるので、平面上だと関数のグラフのような変化が生じるわけです。
また、平面にした場合には奥行き方向の情報はパースを用いて生成したグリッド状でのサイズや形状の変化が生じるので、スローシャッターにしてブラーが入った場合には奥行き方向の移動分だけパースの効果が生じた状態で変化が発生するようになっています。その為、平面的な推移とは異なる面白い変化を実装することが出来るようになっています。
カメラの場合、絵とは異なるのでレンズの焦点距離や光軸の変化で面白い効果を追加できるわけですが、被写体ブレを使うと面白い効果を得ることが出来ます。
写真の場合、被写体を追いかけることで流し撮りを用いることで被写体だけを止めて背景を流すような撮り方ができます。
これがカメラを動かして撮影する方法になりますが、固定しなければならない条件の場合、
■ 被写体が動く
■ カメラが動く
と言う状態が発生するとブレが生じるので失敗写真になってしまいますが、こうした撮影方法は
【 状態を定数の座標として記録する手法 】
になります。当然、日常生活において全ての時間が停止している瞬間は存在しないので、目視している空間以内では何かしらの動きが生じています。つまり、時間単位の推移が生じているので 【 法則性に基づく動作 】 が発生しているわけです。この動作を記録しようと思った場合、時間を長くすればいいので 【 等式 】 ではなく 【 不等式 】 で範囲指定を行うことになります。
こうすることで 【 変域 】 を用いて時間単位の推移を記録することになるので、 【 変化を示す線分 】 を写真に記録することが出来るわけです。
写真の場合、記録するものが定数と推移では異なるので、対象によってシャッタースピードや撮影方法を変更することになります。
ピンぼけ
写真を撮影する場合には、
■ 被写体がブレている
■ 全体的にぶれている
というブレによる影響もありますが、そもそも
【 ピントが合っていない状態 】
になる場合もあります。
これは、【 主題が解らない状態 】 ですから、写真としてはよく解らないものになります。通常の撮影だと、
【 対象となる主題が決まっている 】
ので、少なくともその主題に視点が行く必要がありますから、ここがぼやけていると主題ではなくなるので全体の意味がなくなってしまいます。
その為、 【 主題にピントを合わせる 】 問動く当たり前のことを行うことになります。こうした考え方はカメラのみで生じるものなので、レンズ付きフィルムのようなフォーカスの概念がない物だと全く考えが発生しないのですが、こうした製品は 【 F値の値が高いので被写界深度が深くなる 】 特性があるので、そもそも被写界深度のコントロールという概念もありません。また、説明書を見ていない場合だと、 【 最短撮影距離自体が解っていない 】 ので、 【 無駄によりすぎてピンぼけ写真を量産することになる 】 わけですが、レンズ付きフィルムのバリエーションが多い時代には 【 マクロ 】 という寄りで撮る専用のものも出ていたので、通常のものとそういった製品では撮れるものが異なるわけです。
その為、レンズ付きフィルムしか知らない場合、カメラとは異なるので、カメラの基本的なことを理解することは出来ません。また、フォーカスの概念がないので、シャッターを押せば撮れるという間違いを 【 レンズ付きフィルムで覚えてしまう恐れがある 】 わけですが、そうした間違いが慣習化するとまともにカメラを使えない状態になります。
カメラの場合にスマートフォンですら被写界深度の影響が出るので知っておく必要ありますが、ピントをどこで合わせるのかで写真の状態が変わってきます。
ピントと被写界深度
小型センサーのカメラの場合だと、被写界深度が深くなる特性がある(のと同時にダイナミックレンジは狭くなります。その為盛大の古いイメージセンサーと画像処理エンジンお組み合わせだとクロマの階調が狭くなっています。)のですが、こうした製品でもマクロ撮影を行うと被写界深度はかなり浅くなります。その為、フォーカスブラケケットが使用できる製品だと震度合成を行って調整を行うことになりますが、通常の撮影だと 【 絞り 】 によって被写界深度を深くすることになります。
こうした撮影を行うと小型センサーのデジカメでも被写界深度とピントの重要性を体験できるので考えながら撮影することが出来るので、個人的にはライティングなどの工夫が必要になるマクロ撮影で色々試すと考えながら撮影する能力が養えるようになると思います。
また、これを行うと 【 自然光の不足分 】 を感じるようになりますが、光の状態を考えることが出来るようになると、 【 どの指定であれば意図した光になるのか? 】 を考えて対象のは位置方法を考えることが出来るようになります。
これがカメラでの内容になりますが、3DCGはマクロ撮影と同じように
■ セットを組む
■ ライティングを行う
■ 撮影をする
と言う流れになっているので、3DCGツールで行っていることをを写真に持ってきますし、その逆の事も行うことが出来ます。
ピントによる見え方の違いは、

の中でもじれていますが、ピントの位置が異なると

のような差が生じます。また、被写界深度については、

の中で触れていますが、基本的にピントの面画存在しており、そこから絶対値として被写界深度の深さを絞りで指定して、符号をつけて±の方向に幅をもたせた状態で指定することになります。この効果を絞りで実装することになりますが、これによって強調する部分と省略する部分を決めてフレーム内の成就帯を作ることが出来るようになっています。
写真は焦点距離で距離の圧縮効果が加わるので見え方が変わるのですが、

の中で紹介しているように焦点距離が変わると


のような変化が生じます。また、ピントの位置が変わると、
ると、

のようになるので全く意味合いが変わってきます。ちなみに、この写真は構図を換えておらず光学系の状態の変化のみで生じているものなので、セットを換えずにカメラで撮影した結果になりますが、レンズの焦点距離の変化だけでもこれだけの違いが生じます。
その為、【 フレーム内の状態に合わせた被写界深度 】 を考えて調整する必要がありますし、対象以外の情報が不要な場合だと、どれくらいディテールを減衰させて再現するのかを考えることになります。
このようにピントの位置から外れるとピンぼけが生じるのですが、こうした内容は

の中で触れています。
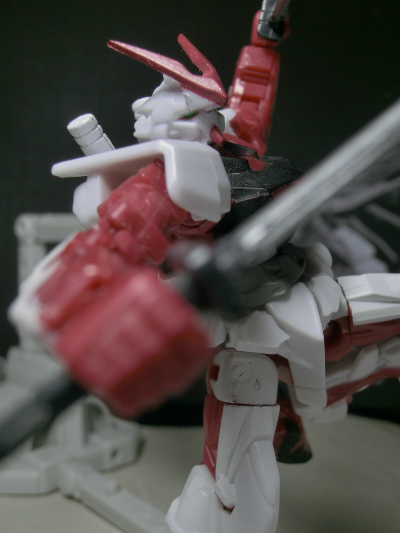
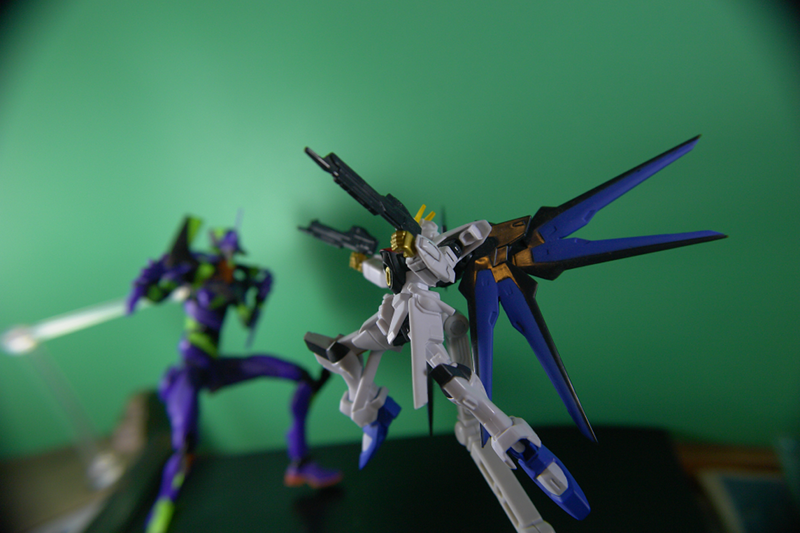
背景のボケ
写真を撮る際に背景をぼかして被写体を浮かび上がらせる方法がありますが、この場合、大型センサーのカメラで明るい単焦点レンズを使うことになります。この条件で、被写体と背景との距離を大きくすると背景はボケてくれますが、このカメラとレンズの組み合わせにすると広角側でも効果を得やすくなるので、焦点距離の自由度を高めることが出来ます。
こうした理由から大型センサーと明るいレンズの組み合わせを使うことが推奨されているわけですが、これが小型センサーや暗いレンズになると前述の条件ではボケが少なくなるのでマクロのように被写体によって背景との距離を長くするような方法を用いたり、焦点距離を伸ばす必要がでてきます。
その為、焦点距離の自由度がなくなるので、ボケを使った表現の選択肢が少なくなります。
カメラの選択ですが、撮影の選択肢が狭くならないような機材選びが行われているので必要な構成になっているわけですが、これも 【 基本的にマニュアルで調整出来る状態を増やすための選択 】 になります。
こうしたカメラの構成にすると機材の導入コストがものすごく高額になってしまうわけですが、前述のようにマクロ撮影だと飛車貸インドを浅く出来るので小型センサーのカメラでも被写界深度を考えた撮影が出来ます。
デジカメの場合だと、フィルターネジが切ってありレンズフィルターを使用できる環境であれば、クローズアップレンズフィルターを使うことで寄ることが出来るので被写界深度を浅くすることが出来ます。なので、超望遠デジカメのように1/2.5型センサーの製品であっても被写界深度を浅くすることが出来ます。ただし、広角側だとケラレが出るのでソフト側でクロップして使用することになります。
テレマクロだとクローズアップレンズフィルターは面白い効果を得られるのですが、通常の撮影だと

のようになるものを

のように撮影することが出来ます。ちなみに、天体望遠鏡のような焦点距離で地上のものを撮影すると

のようにパースが反転したような面白い効果を得ることが出来るのですが、Panasonic Lumix DMC-TZ85でもテレ端を使用すると

のように背景のボケを使用することが出来ます。
今回撮影したもの
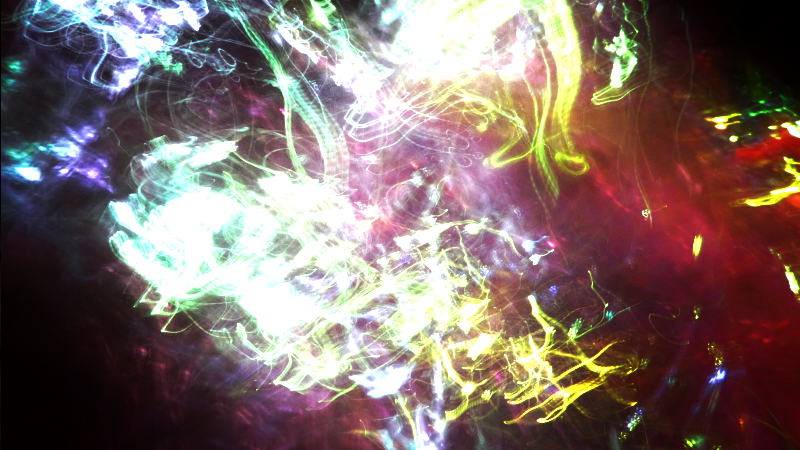
小型センサーのカメラだと飛車貸インドの調整幅が狭いので被写界深度を深めにしたとり方で考えることになりますが、フォーカスアウトした場所を撮る場合だと大きなボケとして撮影することが出来ます。
















のような感じでボケを作ることが出来ます。
この写真は、Panasonic Lumix DMC-TZ85を使用しているので、被写体にフォーカスを合わせるとこういった大きなボエはでないのですが、ボケのみを撮る場合だとこうした撮影が出来ます。また、こうした素材を使って加工を行うと



のようなものを作ることが出来ます。肉眼で見ている場合、ブラーと同様にこうした物は見えないことが多いのですが、カメラを使用すると当たり前に撮影することが出来ます。
こうしたボケ形状は状態ですから、写真ではなく動画で収めることもできます。