1昨年4月の1号機調査では、ヘビ型ロボットが立ち往生、回収を断念し格納容器内に放置したままで調査は中止。
ヘビ型の失敗を教訓に、2号機調査用・改良サソリ型ロボットが開発されたが・・
福島原発:ヘビ型の次はサソリ型? 2号機にもローテクロボット投入
【ヘビ型にしてもサソリ型にしても、構造上どこかで引っかかり回収不能になる運命。
紐付きのハイテク?ロボットを投入するくらいなら、光ファイバーの先にカメラを取り付けた
内視鏡を押しいれる方が現実的、ほぼ確実に格納容器の底に到達するはずだが・・】
ローテクの極み?伸縮パイプを挿入した先行調査では、先端に取り付けたカメラが圧力容器直下、〝燃料デブリ〟が作業用足場に開けた大穴を映し出したが、
【福島原発事故6年】燃料デブリ初確認??ローテク伸縮パイプで??
東芝の技術の粋を集めたハイテク?サソリ型ロボットは、僅か3m進んだだけで 2年前のヘビ型ロボットと同じ運命に・・

関連記事 楢葉で「高専生ロボコン」...廃炉へ技術競う 地元・福島が特別賞
〝燃料デブリ〟調査:本当に必要なのは・・子供騙しのローテクロボットより作業員の身代わり
福島原発2号機〝燃料デブリ〟が通過した跡は 秒殺レベルの530シーベルト
国際廃炉研究開発機構(IRID)
PCV内部調査装置(サソリ型ロボット)の改良について[開発担当:東芝](2016年2月18日)
佐賀新聞LIVEより
福島第1原発 2号機ロボット調査失敗 溶融燃料確認できず 東電、計画見直し必至
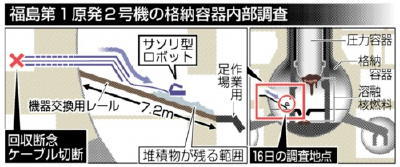
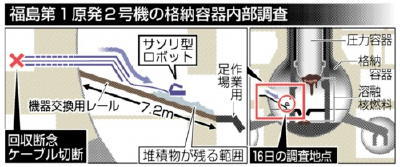
【東京電力は16日、福島第1原発2号機の原子炉格納容器内を本格調査するため、カメラと線量計を搭載した自走式ロボットを初投入したが、圧力容器直下の作業用足場に到達できなかった。
炉心溶融で溶けた核燃料(デブリ)の実態把握には至らず調査は失敗した。ロボットは途中で走行できなくなる不具合が発生し、回収しないまま格納容器内に残した。
デブリ取り出しは廃炉作業の最大の難関とされる。前段となる本格調査でつまずいたことで、東電が抜本的な計画の見直しを迫られるのは必至だ。デブリの実態把握が進まなければ、政府や東電が描く取り出しプランの遅れにつながる可能性もある。
東電によると、ロボットは前後にカメラがあり、サソリのように後部が反り上がり撮影角度を変えることが可能。温度も測定できる。
午前7時50分ごろに投入し、機器交換用レールに残る堆積物の上を走行したが、圧力容器直下への入り口まで3メートル前後の位置で進めなくなった。左の走行用ベルトも動かなくなった。
ロボットは、国際廃炉研究開発機構(IRID)と東芝が開発。調査は2015年夏の開始を目指していたが、格納容器の貫通部の除染などに時間がかかっていた。】一部抜粋
ヘビ型の失敗を教訓に、2号機調査用・改良サソリ型ロボットが開発されたが・・
福島原発:ヘビ型の次はサソリ型? 2号機にもローテクロボット投入
【ヘビ型にしてもサソリ型にしても、構造上どこかで引っかかり回収不能になる運命。
紐付きのハイテク?ロボットを投入するくらいなら、光ファイバーの先にカメラを取り付けた
内視鏡を押しいれる方が現実的、ほぼ確実に格納容器の底に到達するはずだが・・】
ローテクの極み?伸縮パイプを挿入した先行調査では、先端に取り付けたカメラが圧力容器直下、〝燃料デブリ〟が作業用足場に開けた大穴を映し出したが、
【福島原発事故6年】燃料デブリ初確認??ローテク伸縮パイプで??
東芝の技術の粋を集めたハイテク?サソリ型ロボットは、僅か3m進んだだけで 2年前のヘビ型ロボットと同じ運命に・・

関連記事 楢葉で「高専生ロボコン」...廃炉へ技術競う 地元・福島が特別賞
〝燃料デブリ〟調査:本当に必要なのは・・子供騙しのローテクロボットより作業員の身代わり
福島原発2号機〝燃料デブリ〟が通過した跡は 秒殺レベルの530シーベルト
国際廃炉研究開発機構(IRID)
PCV内部調査装置(サソリ型ロボット)の改良について[開発担当:東芝](2016年2月18日)
佐賀新聞LIVEより
福島第1原発 2号機ロボット調査失敗 溶融燃料確認できず 東電、計画見直し必至
【東京電力は16日、福島第1原発2号機の原子炉格納容器内を本格調査するため、カメラと線量計を搭載した自走式ロボットを初投入したが、圧力容器直下の作業用足場に到達できなかった。
炉心溶融で溶けた核燃料(デブリ)の実態把握には至らず調査は失敗した。ロボットは途中で走行できなくなる不具合が発生し、回収しないまま格納容器内に残した。
デブリ取り出しは廃炉作業の最大の難関とされる。前段となる本格調査でつまずいたことで、東電が抜本的な計画の見直しを迫られるのは必至だ。デブリの実態把握が進まなければ、政府や東電が描く取り出しプランの遅れにつながる可能性もある。
東電によると、ロボットは前後にカメラがあり、サソリのように後部が反り上がり撮影角度を変えることが可能。温度も測定できる。
午前7時50分ごろに投入し、機器交換用レールに残る堆積物の上を走行したが、圧力容器直下への入り口まで3メートル前後の位置で進めなくなった。左の走行用ベルトも動かなくなった。
ロボットは、国際廃炉研究開発機構(IRID)と東芝が開発。調査は2015年夏の開始を目指していたが、格納容器の貫通部の除染などに時間がかかっていた。】一部抜粋