どうも,修士2年の森瀧瑞希です.
気づいたら学生という身分の最終日になっておりました.明日は入社式です.
大学,そしてSSSRCで過ごした6年間は長いようで,本当にあっという間でした.
それだけ忙しくも充実した時間が過ごせたのだと思います.
SSSRCでの活動のおかげで大学生活が格段に楽しく充実したものになりましたし,おそらくSSSRCに入っていなかったら大学院と就職の進路も今とは違ったものになっていたと思うので,SSSRCに入って人生が変わったと言っても過言ではありません.
そんな僕のSSSRCでの6年間を振り返ってみたいと思います.
2018年度(学部1年) 前半
元々宇宙が好きだった僕は,本物の人工衛星の開発ができるという点に惹かれ,勧誘のビラをもらった時点でほぼSSSRCへの入所を決めていました.
この時期は新入生教育でプログラミング,回路やマイコン,システムズエンジニアリングを先輩に教わり,CanSatプロジェクトが始まった頃です.入所時に期待していた通り非常に活動が楽しく,毎週ワクワクしながら活動に参加していたと記憶しています.

プログラミング講習を受ける様子(2018年5月)
2018年度(学部1年) 後半
この時期はもっぱらCanSatプロジェクトに取り組んでいました.
12月が近づくにつれ忙しさは増していきました.非常に大変でしたが,大変な中でも課題を乗り越えていくという開発の楽しさを感じることができました.それでも心が折れそうになる時もありましたが,これを乗り越えれば来年からは衛星開発ができるんだ,ということをモチベーションに頑張っていました.
気球試験で開発したCanSatが無事動いてくれて,これまで感じたことのないくらい大きい達成感を感じました.

僕の班で開発したCanSat(2018年12月)
2019年度(学部2年) 前半
2年生になりました.衛星プロジェクトに参加し,毎週の会議で先輩が話しているわからない単語だらけの話を一生懸命理解しようとしていました.
先輩が持っていたタスクにつく形でタスクがアサインされましたが,あまり衛星システムの全容を理解できてない故にそのタスクのコードがどのように動いているのか,システムの中でどのような役割を担っているのかがいまいち理解できずにやる気を失いかけていました.そんな中,ある先輩が紹介してくれたソフトウェア開発タスクがうまくハマり,手を動かせるようになったことを記憶しています.
開発外では新入生教育に興味を持ち,かなり力を入れて取り組みました.教える側になったことで,1年前に学んだことをより一層理解できました.

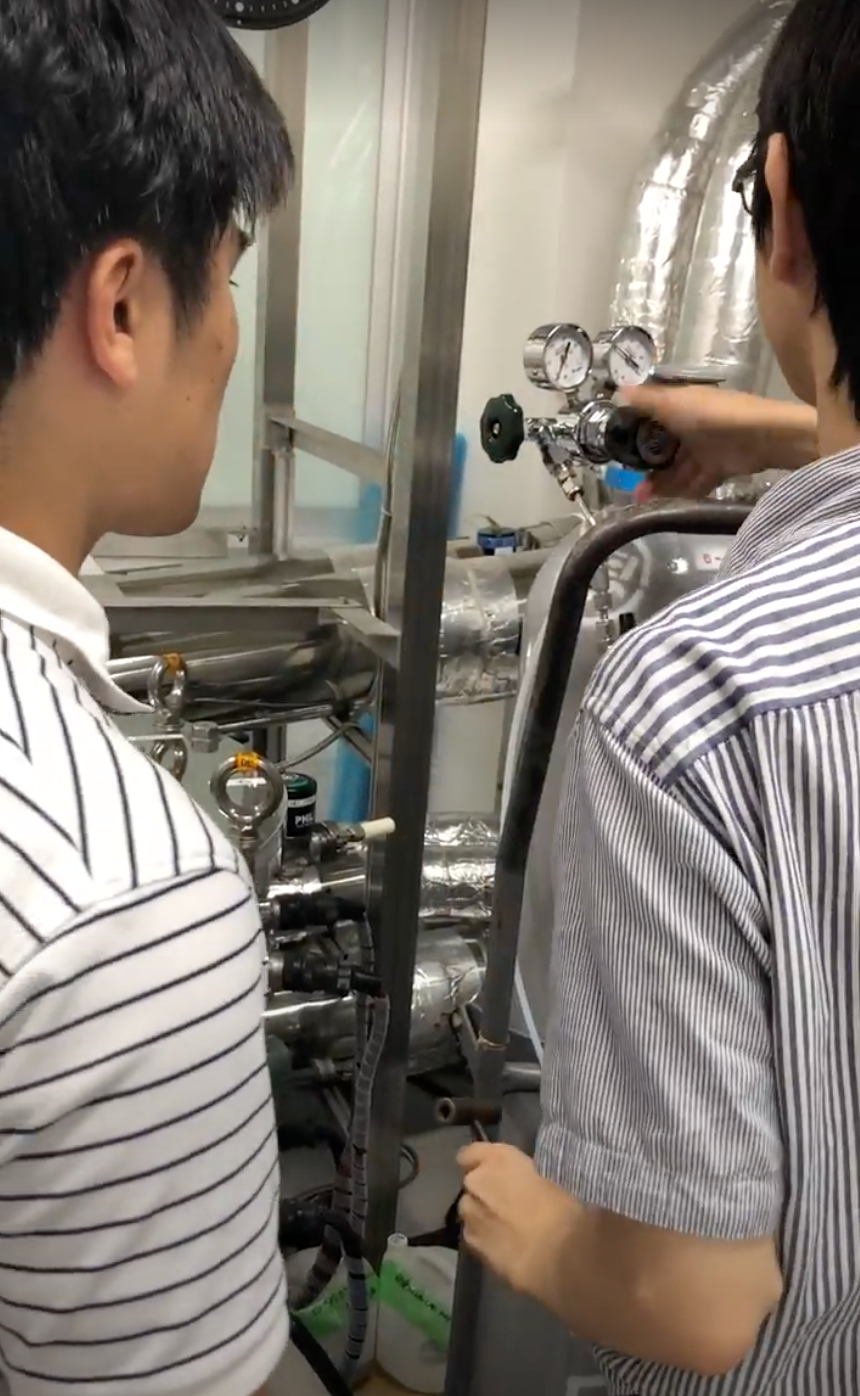
熱真空チャンバー周りの使い方を先輩から教わる僕(2019年8月)
2019年度(学部2年) 後半
新たにC&DH系に加わり,Githubの勉強をしながらひろがりのバス部のコードを読み,アマチュア無線ミッション(メッセージボックスサービス)の許可・不許可を管理する機能の開発を行っていました.
バス部のコードを理解するのが本当に大変で,ものすごく頭がこんがらがりそうになりながら取り組んでいた記憶があります.毎週先輩と話しながら,なんとか実装できましたが,のちに見たFM版のコードの完成部分にはいくらか先輩の手による修正が加わっていました.今思えば,先輩が自分で実装する方が圧倒的にコストが少なくすみそうなので,毎週時間をとって教育コストを割いてくれてたんだなぁと思います.
開発以外の面では,新入生教育以外にも,会計面など関心の幅が広がりました.少し気になったことを先輩に提言して動いてみたりと,活発に動き始めたのはこの頃でした.また,当時M2の先輩と衛星部屋で一緒になることが多く,昔のこと,プロジェクトマネジメントの事など色々と教えてもらいました.

CDR2の様子(2019年10月)
2020年度(学部3年) 前半
年度初っ端から,コロナで二ヶ月も大学に入れなくなりました.あとから思えばたった二ヶ月くらい,と思うのですが,当時はいつまで続くかわからず,今後の授業はどうなるのかという不安もあり,非常に長く感じました.
ひろがりの開発もこのせいで大きな影響を受け,引渡しまであまり余裕がないのに二ヶ月間も開発がストップしてしまいました.
6月に大学に入れるようになると,急ピッチでEnd-to-End試験の準備を進め,6月下旬に試験を実施しました.
僕もいくつか役割をもらい試験に参加しましたが,1〜3つ上の先輩方の活躍には到底及ばず,自分のできることって全然ないなぁと感じました.ただ,1つだけHKテレメトリ生成におけるバグを発見できたので,自分も仕事ができました.PMの先輩にバグの内容とその原因,修正案を報告して理解してもらいましたが検証の余裕がなかったため,最終的には「森瀧が十分に確認して,それで間違いないというならそれを最終盤のソフトウェアに反映しよう」と言っていただき,僕の修正が反映されました.
ここまで4年近く誰にも気づかれなかったバグを,最後の最後で発見できたことと,あまり検証の余裕がない段階でのソフトウェアの修正を一任してもらえたことがとても嬉しかったです.

僕と同期とひろがりのFMとおぷー(2020年6月)
2020年度(学部3年) 後半
この半年は主に広報活動に力を入れた期間でした.
10月のひろがりのJAXAへの引き渡しを皮切りに,多くのメディア取材があり,翌年1月には記者会見,2月には打ち上げ,3月にはISSからの放出と,ひっきりなしに広報関連のイベントが続きました.
10月以降は広報課と広報課が依頼した広報戦略会社と連携をとりながら,記者会見前に報道各社に送付する報道参考資料の作成や取材依頼の対応,記者会見の準備,打ち上げ時や放出時の広報イベントの計画・準備など,本当にさまざまなことをしました.
ここまで広報活動を本格的に行う機会は学生時代にはなかなか得られないし,今後も広報課に転身しない限りは経験しないだろうなと思います.開発だけでなく,こうやって広報等の経験ができるのはSSSRCの良いところです.
広報活動は,自分がメディアの取材対応して話したこと・提供した素材がテレビや新聞に載ったりして,自分がした仕事が表に出るのでとてもやりがいがありました.

ひろがり引渡し後の集合写真(2020年10月)

ひろがりISS到着時の広報イベント後(2021年2月)
この半年は非常にたくさんのことがあり,これだけでは終わりません.なんと言っても肝心なひろがりの運用があります.
ひろがりの運用を開始したのは3月14日でしたが,3月21日まで衛星の電波が受信できませんでした.
この話を始めると長くなるので,詳細は以前に書いた SSSRCだより特別号 をご覧ください.
僕はこの音信不通の1週間,1パスも休まずにずっと大学で地上局の画面の前で待機し続け,色々と試行錯誤しながら原因を探ったり,コマンドを送信してみたりしていました.
この1週間,電波の取れない地上局に誰よりも向き合い続けた分,電波が取れた時の喜びもひとしおでした.下の写真はひろがりの電波が初めて取れた時のもので,僕にとって一生忘れられない一枚です.
運用記録を書き込むログブックというものを用意していたのですが,その記念すべき一行目を誰が書くかという話になった際,先輩が「森瀧が一番頑張ったんだから森瀧が書きなよ」って言ってくれたのが非常に鮮明に記憶に残っています.
この日の光景や感情は,強く脳裏に焼き付いており,死ぬまで忘れることはないでしょう.

地上局の画面上に見えたひろがりの電波の一筋(2021年3月)
2021年度(学部4年) 前半
ひたすら運用に取り組んでいました.ひろがりのような低軌道衛星は,1日のうちの11時間程度の間,約90分おきに10分くらいのパスがやってきます.そしてその時間帯は日中とは限りません.
運用初期の頃はひろがりのパスの時間に合わせて生活をしていました.
1日の初めにその日の運用方針の認識をすり合わせる会議を行い,パスを終えると次のパスまでの90分までの間に,パスの結果を受けての次のパスの運用内容を決定する会議を行うことを繰り返し,その日のすべてのパスを終えると次の日の運用を検討する会議を行なって,運用結果をTwitterに報告して家に帰る,という日々を繰り返してました.
運用は大変でしたが,(いろいろトラブルはありつつも)ミッションも成功していき,達成感も大きかったです.

地上局の画面を囲んで運用を行う様子(2021年4月)
2021年度(学部4年) 後半
2021年度の後半は衛星運用を続けつつ,運用成果報告のプレスリリースと記者会見の準備等をしていました.
必要な運用は終えたので,今後の衛星開発に参考になりそうなデータを取るための運用をしたり,メッセージボックスの運用をしたりと,余裕があるからできる運用をしました.
運用を進める中,次のOPUSAT-IIIの検討にも力を入れていた時期です.
この年度末に大学を卒業しました.

はやぶさ2プロマネの津田雄一先生とSSSRCの学生・教員で(2021年12月)
2022年度(修士1年)
ここからは学部の時ほどのトピックがないので年単位でいきます.
2022年度からは東京大学大学院に進学して,リモートでSSSRCの活動を続けることになりました.
この一年はOMUSAT-IIIのプロジェクトマネジメント,通信系の設計,広報,会計,新入生教育等をやりました.
コロナでリモート体制が整っていたおかげで,リモートでも意外と活動できました.
研究が忙しく徐々に活動できなくなることと,残り2年を切ったことから,自分のこれまでの活動内容をもとに,後世に何を残せるかを考えながら活動するようになりました.
関東にいることを活かして,UNISECのイベントに参加したり,筑波大学の結プロジェクトやWARPSPACE社を訪問したりもしました.

筑波大学結プロジェクトおよびWARPSPACE社の皆さんと(2022年10月)
2023年度(修士2年)
最後の年は,過去の多くの修士学生と同じく徐々に活動から退き,日頃の活動の中で自分がサポートできそうなことや助言をしたり,自分がやってきたことの引き継ぎ等を行いました.最後まで欠かさず活動したのは広報くらいでした.
ただそんな中でも,UNISEC総会に参加してみたり,SSSRCと連携協定を結んだe-kagakuの方の衛星プロジェクトに参加してみたりと,個人的にはいくらか新しいこともしました.
9月には電子物理の高橋先生にお誘いいただき,SSSRCと高橋研の合同でSpaceLinkという宇宙関係の展示館に出展も行い,僕も参加しました.
10月には,日本未来科学館で開催され,SSSRCからはロケットプロジェクトが出展したロケット交流会にも参加しました.
展示会への出展は過去に経験がないため,新しい経験ができて楽しかったです.

SpaceLinkにて高橋研の皆さんとSSSRCメンバーで(2023年9月)
最後に
いくつかかいつまんで概要を書いただけでそこそこのボリュームになりました.
ここまで書いてきた内容それぞれにももっと深い話がありますし,このブログに書ききれなかったトピックもたくさんあります.
それだけ濃い6年間を過ごすことができました.
SSSRCで大きく成長できましたし,大事な思い出もたくさんできました.
この素晴らしい環境へ入れさせてくれた両親,本当に様々なことを教えてくださった先輩方,一緒に頑張ってきた同期,SSSRCでの楽しい思い出を作ってくれた後輩たち,SSSRCを築きこれまで活動を発展させてきたOB・OGの皆さんと先生方,そしてSSSRCの活動を応援し支えてくださっているすべての方に感謝しています.
本当にありがとうございました!!
4月からは宇宙分野でエンジニアをすることになりました.
現時点ではひろがりの運用の思い出が今後簡単には越えられる気がしないくらい大きな達成感と喜びを持ったものとなっているので,今後のひとまずの目標は仕事を頑張って,ひろがりの思い出を越えられるくらいでかい達成感を得ること!にします笑
これからもSSSRCで過ごした日々を糧に,日々精進していきます.