期末試験が終わって旅行に出かけたら、旅先でアメブロの存在を思い出しました。ヤバいです!何も書いてない!!!
ということで泣く泣く横浜のネカフェでブログを書いてる一回生の寺倉です(夜の中華街はめっちゃ良かったゾ!)
閑話休題。
とりあえず一回生の締めくくりということで、CanSatA班が何をやったのかを大雑把ではありますが紹介していきます。
A班のミッション
まず僕たちは話し合いの末、以下のようなミッション目的を立てました。
"月面のわずかな起伏を整地するCanSatを開発する。整地後の地面は人間が居住する建造物を建てる際に支障がない程度の凹凸を目指す。"
とまあ、なんか大層なことを書いておりますが、要はCanSatで地面を整地しようというわけです。
この案に至るまでに色々な案が出ましたよ。蛇型ロボットを開発してプールを泳ぐとか、カラスを追い払うロープウェイを作るとか、今思えば正気かと突っ込みたくなる案も多かったですw
で、整地するCanSatを実際に開発しましたよ。
見てください。カッコイイでしょう(笑)。
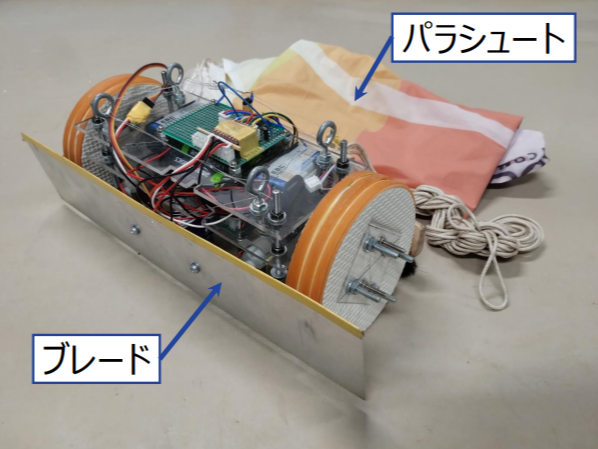
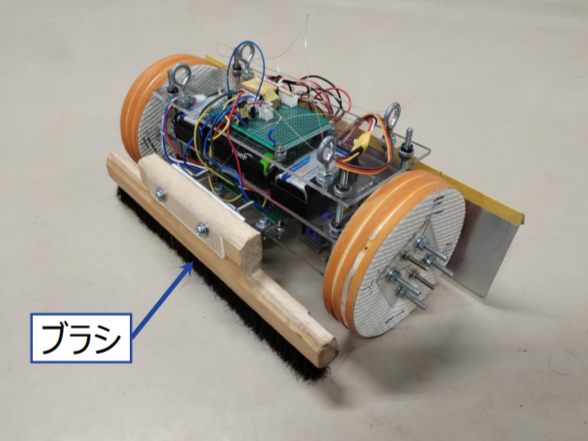
左写真は進行方向左前方から見た図です。手前のブレードで地面に落ちている大きめの石を除去します。そして右写真は右後方から見た様子です。車体後方に取り付けたブラシで細かい土や砂を均します。前門のブレード、後門のブラシで地面の凹凸を3mm以下にしようというのが僕たちのミッションです。ちなみに全長は130mm、全幅は300mm、高さは130mmで重量は1034gです。車体中央部にはマイコンやモータなどを搭載しています。
それでは開発のスケジュールを順に振り返って紹介します。
8月
ミッションの選別と決定。8月下旬から要求分析を開始。
まずCanSatで何をやるのかZOOMで話し合って決めました。お互いほぼ初対面の状態で会議を始めたので全然会話が弾まなかったです(苦笑)。じゃあ対面でやればいいじゃないかという話になりますが、、、メンバーの半分以上が実家に帰省したり旅行したりでなかなか機会がなく。。
まあ何とか最初の三週間を乗り越えて、8月23日頃からぼちぼち要求分析を始めました。この要求分析が先輩からのダメ出しの連続でして、、そのまま9月に流れ込むことになります。
9月
要求分析、仕様検討。
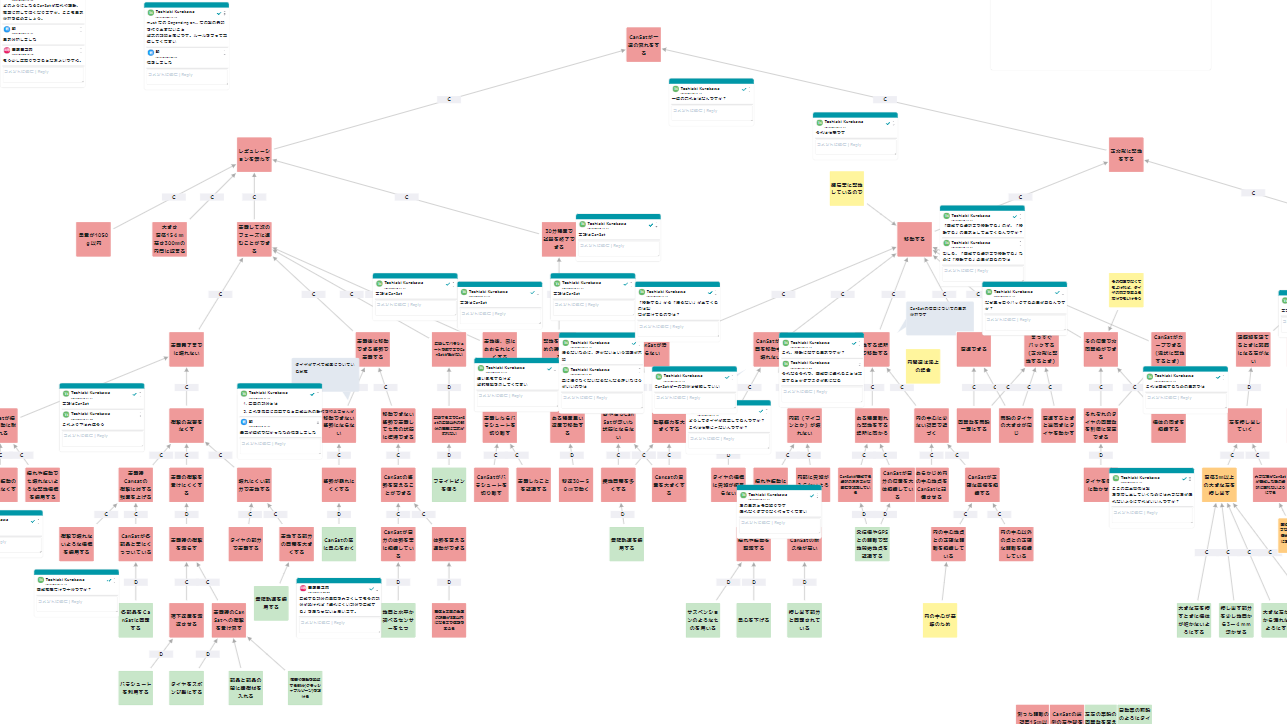
8月の下旬から引き続き要求分析をひたすら続けてました。要求分析とは何ぞやと哲学的に考えたりもしましたが、結局よく分からなかったです。
時期的には仕様検討を始めないといけない頃です。そこで毎晩の会議では要求分析の議論の後、仕様検討についても話し合うことに。結果、ほぼ毎晩夜中の1時過ぎまで活動することになりました(汗。なお他の班はそうじゃなかったようで、1時まで残業していることを言うとかなり驚かれました。あ、これあれですね。ブラック企業に勤めてることをカミングアウトした時の感覚に近いと思います。おかげでA班はブラックだという噂をよく聞くようになりました。。
10月
要求分析、仕様決定。
結局夏休み中に要求分析が終わらず、要求分析が曖昧なまま仕様検討を開始しました。しかし、仕様を決定しようという段階で要求分析の甘さを先輩から指摘され、ほとんど一からやり直しました(涙)。本来なら夏休み中に終わらせるべき要求分析をまたやり直すのです。しかもCanSatの構体製作を始めなければいけない頃です。
どうしようもなかったので要求分析を練り直しました。二回目なので慣れたものです。案外早く完成しました。そんでできた修正案を先輩方に見せましたが、反応は微妙。。まあ構体製作の許可が取れたので良しとしましょう。
11月
構体製作、単体試験、統合試験、パラシュート試験。
構体を設計、製作して単体試験を行いました。パラシュート試験もやりました。

このパラシュートが曲者でして、うまいこと開かなかったり風に流されたりして全く言うことを聞かないんです。おかげで本体を構成する板を何枚も割りました。。。後で分かったのですが、どうも板の厚みが不足していたため落下の衝撃に耐えられなかったようで。3mm厚の板よりも2mm厚の方が安いやんと2mm厚のものを買ったのが失敗だったようです。安物買いの銭失いですねー…。
統合試験が終わると、次はユニバーサル基板に部品をはんだ付けして基板上で試験を行います。ブレッドボードではうまくいっても基板では分かりません。接触不良、時々電池切れ、所によりマイコン故障…。
そうです。
マイコンを4回も壊しました。
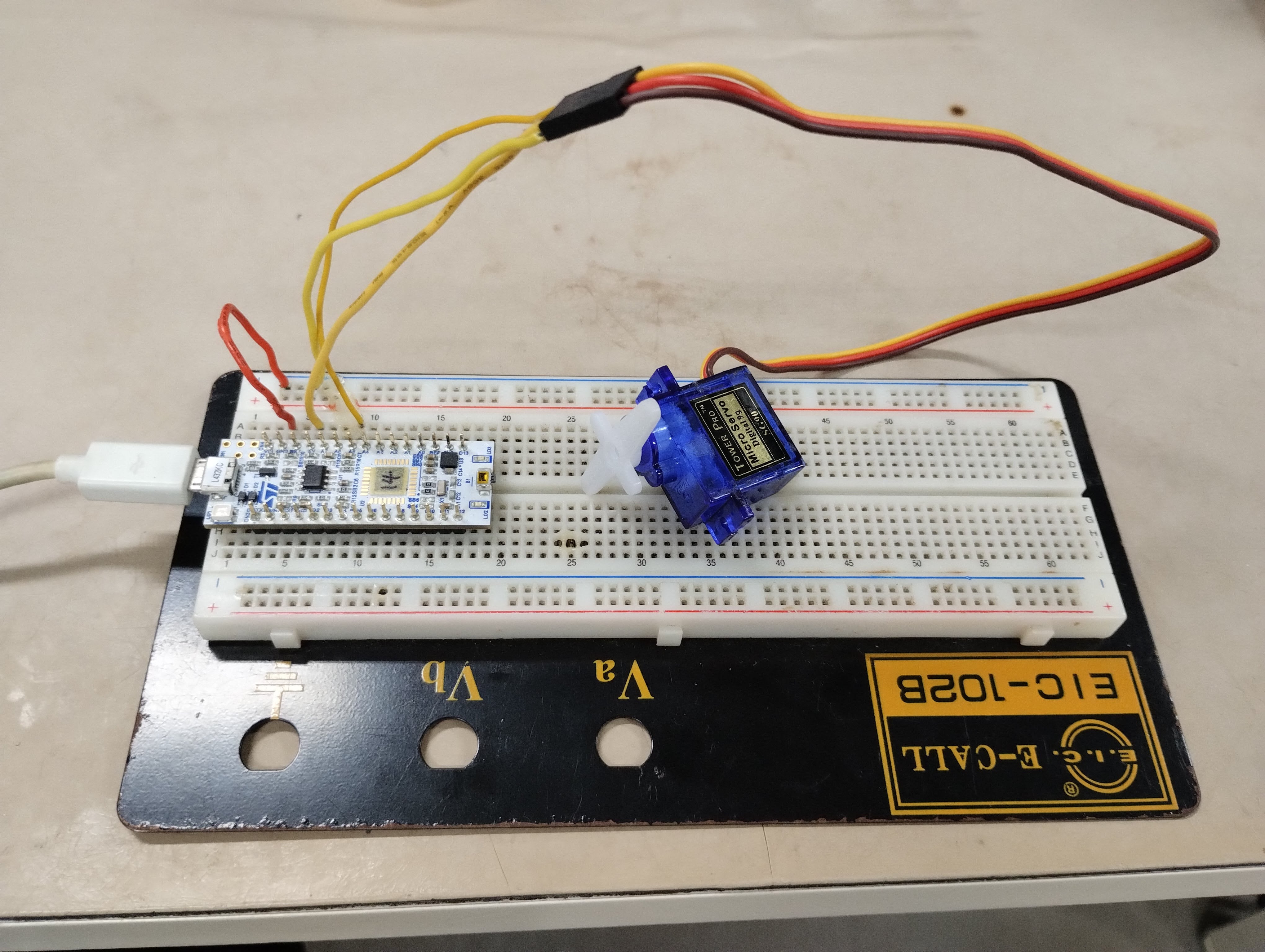
▲回路図を確認しないまま試験してマイコンを壊したの図。良い子はマネしないように。
壊した原因は注意欠損や静電気などです(ちなみに1個はモッサ先輩に直してもらいました)。
SSSRC CanSatマイコン破壊部門で堂々の優勝です()。ただ、壊してしまった経験が元となって精密機器に対する向きあい方が改善されたりマイコン内部構造の理解が深まったりしたので無駄ではなかったと思います。ほら、人間は失敗から学ぶと言うじゃないですか(知らんけど)。
12月
気球試験に向けて。
気球試験まで残り二週間となったので、衛生部屋に詰め込んでひたすら作業と試験をしました。残された日数が少ないので当然焦ります。徹夜も何度かしました。
そしていよいよ12月17日の気球試験当日を向かえました。実は僕らのCanSatが完成したのはこの日の早朝です。先述したように僕らのCanSatは整地をするのがミッションなんですが、タイヤを駆動するモータのトルク不足が原因でCanSatが整地中に動かなくなるんです。小石や砂がブレードに堆積して止まるようでは整地ロボットとは言えません。何とかしようとタイヤの摩擦係数を変えたり重量配分を見直したりしましたがダメでした。正直CanSatで整地するのは無理なのかなと諦めかけたのですが、徹夜で作業してる内にひらめいたんです。
モータにかける電圧を大きくすれば動くのではないか。
ということでモータに加える電圧を3.6Vから4.8Vに変更しました。

思い通りに動くようになりました。ちゃんと整地出来てましたよ。やったね!期限までに完成して良かった!
気球試験当日
そんな訳でギリギリとなりましたが、僕らのCansatは完成しました。後は無事にパラシュートが開くのを祈るだけです。

▲放出機構にCanSatを収める様子。
▲放出機構の操作リモコン。
指定の高度に達したら、放出機構のボタンを押します。ところが、、


はい。南風に乗って飛ばされてしまいました。。気球は今どこにいるんでしょうねぇ…。一ヶ月以上経ちましたがまだ行方不明です。
真面目な話、もし人の頭上に落下したら大きな被害を及ぼしていたかもしれません。人的被害が発生しなくても、人家の屋根を破損したり電線に接触したりすると大変です。SSSRCは今後同様の事故を発生しないよう十分な対策を講じた上で、細心の注意を払いながら気球等を用いた試験を行うようにします。また、もし道端でCanSatのような不審物を発見された場合は警察をお呼びいただくと共にSSSRCにもご一報いただけますと幸いです。
まとめ
とまあ、半年間のCanSatミッションを振り返ってみると本当に色々なことがありました。要求分析の不足で苦労したりマイコンの破損が連続したり、最後は気球ごと紛失というハプニングもありましたが、今となっては全てが貴重な体験だったと思います。この半年間で学んだことを糧にして今後の衛星開発やロケット開発、さらにはその後の社会に役立てていけたらと思います。末筆にはなりますが、一回生の教育にご尽力いただいた先輩方や先生方、およびSSSRCの活動を日頃から支えて頂いている全ての方々に感謝を込めてこの記事を終えたいと思います。
長い文章でしたが最後まで読んで頂きありがとうございました。またお会いしましょう。