次はIMU(加速度センサー)のキャリブレーションを行います。
キャリブレーションの種類には
1-point IMU Calibration
6-point IMU Calibration
とありますが
最初は6-point IMU Calibrationで正確にやった方がいいと思います。
STorM32とIMUの接続に関してはこちらの記事を参考にして下さい。
まず、ある程度正確性を増すために
IMUを6面体のCUBE状の何かに取り付けます。
CUBE状であれば何でもいいです。

準備ができたらSTorM32をPCと接続します。
この時、STorM32はバッテリーとは接続しないで下さいね。
あくまでUSBからの電源のみです。
次にo323BGCToolを立ち上げてReadボタンを押します。
STorM32とうまく接続できたならSetupタブを開きます。
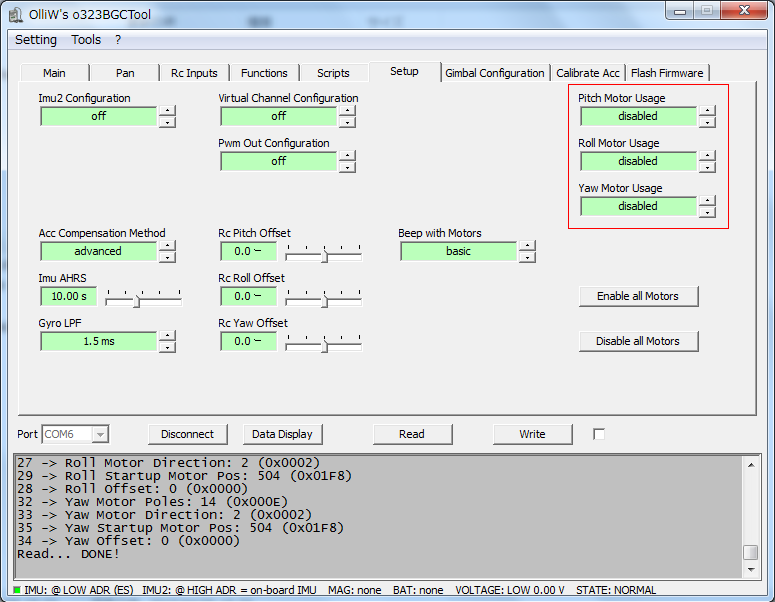
このタブの右端に
Pich Motor Usage ・RollMotor Usage・Yaw Motor Usageとありますが
すべてdisabled(使用禁止)になっているか確認してください。
なっていなければdisabledに変えて下さい。
確認ができたらCalibrate Accタブを開きます。

①はキャリブレーションしたいIMUを選びます。
今回はカメラ用のIMUなのでImu (camera IMU)を選びます。
次に6-point IMU Calibrationボタンを押します。
すると次のような画面が現れます。

IMUを回転させると、1~6までの.Point (+-○)の左側に
矢印みたいなのが移動すると思いますが
IMUを動かして、それぞれのポイントに矢印を持って行き
Accept current readingsボタンを押していきます。
順番は適当でも大丈夫です。
すべての軸のキャリブレーションが終ったら
Save to fileボタンを押して
一旦キャリブレーションデータを保存しときましょう。
保存が終わったらOKボタンを押します。
そしたらCalibrate Accタブに戻るので
そこにあるStore Calibrationボタンを押します。
You are going to rewrite calibration data permanently!
Are you sure you want to continue?
とメッセージが出るのではいを押します。
これで終了です。
2nd IMUも同じやり方なので、必要ならば行って下さい。
一応、一連の流れの動画です。
モアレが出ていて見にくくなってるのであしからず。
大きくして見てね