1)歩行は、エネルギー消費をできるだけ避けて、長距離を効率的に移動する方法として人に備わっている。その重要なポイントは歩行の主な要素は重力に支配された振り子運動だということである。従って、歩行で意識の支配下にあるのは:①前方にあった足が踵で着地したのち、体全体の重心を上方に移動する;②後方の足が蹴り上げで地面を離れたあと、振り子運動を開始する;この二つを少しの遅延時間(重心移動の時間)を置いて行うことである。
これを表現したのが次図である。
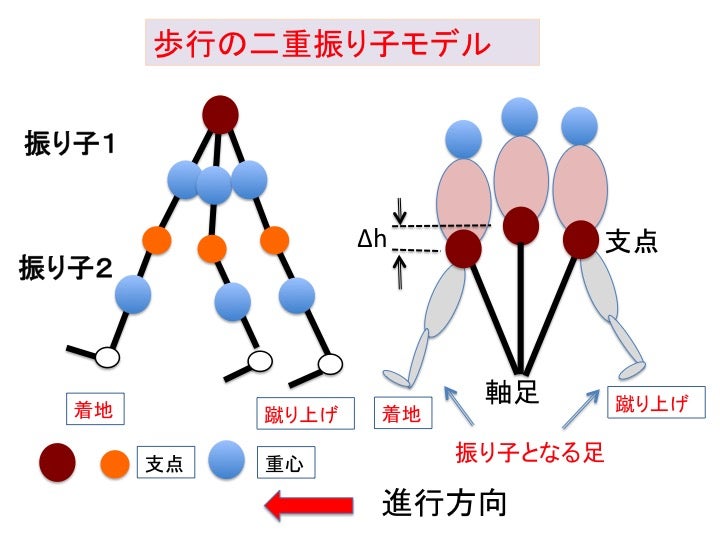
図の右で、体が真ん中にあるときが重心が一番高い状態であり、それは左の振り子運動をしている足が一番屈曲している真ん中の状況である。
ここで、重力に支配されるのは、蹴り上げの力と、振り子運動の周期である。蹴り上げに必要な力は重力に比例する。一方、振り子運動の周期(一歩分の時間)は重力の平方根に反比例する。
数式を用いれば、図の右の重心(円で表記)がΔhだけ高くなるとするには、足の蹴りで、MgΔh だけのエネルギーを供給することになる。一方、この図で表す半歩分の時間は、T=2π・SQRT(L/g)の半分であり、SQRTは平方根であり、通常√で表現する。
右の振り子運動のモデル図で、太腿に関する振り子の重心は、ほぼ太ももだけの重心に等しいだろう。それは、蹴り上げから始まる全体の重心移動と膝関節の回転により、膝下部分が太腿部分をほとんど下方に引っ張らないからである。また、太もも部分の振り子運動の周期も、膝関節以下の振り子運動も位相差があるものの、周期そのものはほぼ等しいだろう。
以上から、前回記事では太もも部分の長さの半分を、これらモデルにおける振り子の竿の長さと考えた。もし、背の高い人でこの長さが30cm(太ももの長さの半分位)なら、一歩が約0.55秒、背の低い人で振り子の竿が20cmと短い人では約0.45秒となる。この数値が実際の周期に近いこと(補足1)が、この二重振り子モデルが支持される。
2)ここで、月面歩行を考えてみる。(アポロ11号の月面着陸は捏造だろう:https://rcbyspinmanipulation.blogspot.com/2016/12/11.html )
月面歩行では、重力が6分の1になるので、地表と同じ距離の一歩とするには、蹴りの力を1/6にする必要がある。一歩の時間も蹴りの時間も長くなり、√6倍(2.45倍)になるので、つま先を着地のために出す時間をそれだけ遅くする必要がある。
従って、地表でゆっくり歩くのと違い、慣れるのには長時間を要する筈である。特に自由な振り子運動は、地表での歩行では意識にほとんどないので、時間を頭で数えながら、あるいは目で太ももの移動を一々確認しながら、着地のために足を出す必要があるだろう。
蹴りの力は、体重と同じ荷物を背負う形でも、尚三分の一である。一方、関節での回転の摩擦は、地表と変わらない。歩行には、これら地表と変わらない部分、重力に比例する部分、重力の0.5乗に比例する部分など諸要素があるため、脳は簡単にはそれらパラメータの書き換えができないだろう。
それは月面にある人に、大きな違和感を与えることになる。それは、青い地球の美しい姿とともに強烈な印象を与える筈である。アームストロング船長の言葉にその実感が欠けている。
前回の歩行モデルの記事をわかりやすく書き直しました。文献等は、前回記事をご覧ください。
補足:
1)不動産屋の広告で、駅から歩いて10分というような場合、通常1分で80m歩くことを想定している。つまり、歩幅70cmなら、歩数114歩であり、歩く周期(2歩)は1.05秒となる。これらの数値は、実際とかなり近い。
追補:(7月25日早朝)
1)走るときには、太ももの前後運動は、振り子運動ではなく意識的に筋肉を前後させて行う。この前後運動の周期と、宙に浮いた体の落下が、同期しないといけないので、月面で走ることも非常に慣れるのに時間を要する。蹴る方向と蹴る力で、落下時間が変化するので、タイミングが合わないのは歩行の場合と同様だろう。
2)ロシアで宇宙飛行士になった秋山豊寛さんに、佐々木敏という方がインタビューして、アポロの着陸捏造説を聞いたという。その記事のサイトを引用します。http://naotatsu-muramoto.info/utyuu/utyuu4.html
3)この4月に書いた記事で、米国の宇宙飛行士が米国は現在月に無事人を送る方法を持たないと、言っている動画を紹介しました。(discover TV) そこで、NASAに気を使っていか、嘗てはその技術があったといっているが、それはそのまま受け取る人は皆無だろう。https://ameblo.jp/polymorph86/entry-12466516831.html(7月29日追加)