IMU(加速度センサー)のキャリブレーション及び
ハードウェアのセッティングは終わってるものとします。
IMUのキャリブレーションの仕方は、これを
ハードウェアのセッティングはこれを参考にして下さい。
それではやっていきましょう。
とその前に、ジンバルのバランスは
ちゃんととっとていて下さい。
まず、STorM32とPCを繋ぎます。
そして、お使いのo323BGCTool_v○○○を立ち上げて
STorM32が繋がってるCOMポートを指定しREADボタンを押します。
全体的にテキストボックスが
ピンクっぽい色から薄い緑に変われば
STorM32とやりとりできる状態です。
この時、バッテリーはまだSTorM32に繋げないで下さい。
さて、最初にIMUの向きと
ジンバルモーターのパラメータ値を設定するんですが
やり方としては、手動で設定していく場合と
ジンバル設定ツールを使って設定していく方法があります。
STorM32のサイトには手動でやると設定が困難となっているので
ジンバル設定ツールを使ってやっていく方がいいのかも知れません。
私は1個目のSTorM32は手動で設定を行って
大きな問題は起きていませんが
とりあえずジンバル設定ツールを使ったやり方を説明します。
o323BGCToolのGimbal Configurationタブを開きます。
その画面の、左側真ん中あたりに
Configure Gimbal Toolボタンがあるので
それを押します。

すると、次のような画面が現れます。
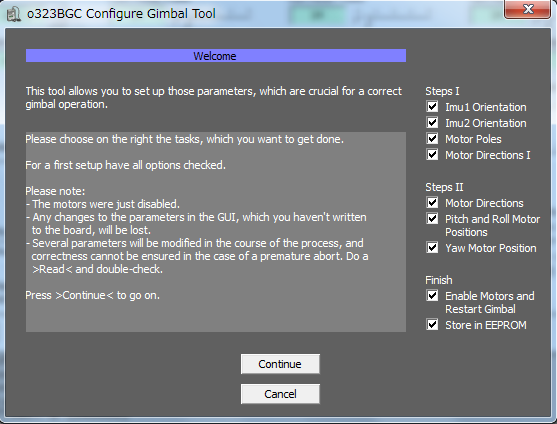
右端に、設定する項目を指定できるようになっていますが
初めてセットアップする場合は
すべてのオプションにチェックを入れて下さい。
次にContinueボタンを押します。
すると、次のような画面になります。

この画面ではIMU(加速度センサー)の方向を設定します。
まずジンバルのカメラを、手で機体の前進方向に向け
水平になるようにします。

モーターの磁力のせいで完全に正面を向かない場合は
+-15°以内で収まるようであれば、それでも大丈夫みたいです。
出来たら、Continueボタンを押します。
すると、次のような画面になりますので
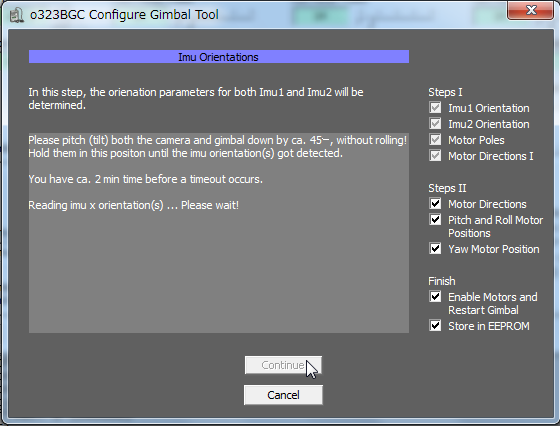
今度は地面を撮影するような感じでカメラを45°前に傾けます。
この時、カメラだけを45°下に向けるのではなく
機体とカメラは水平を保ったまま全体的に45°傾けます。

もし傾けた時にカメラが動いてしまう場合は
バランスを見直してください。
傾けるとIMUの向きを決定しその値が表示されるので
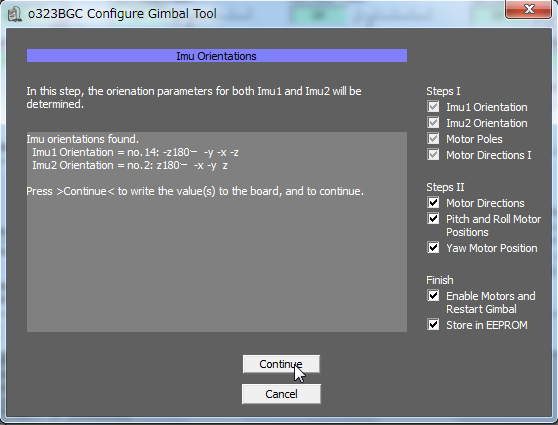
ジンバルを通常の位置(正面を向いてる)に戻します。
そして、Continueボタンを押します。
次はジンバルモーターの極数の設定ですが
これはモーターの製造元もしくは売り手から
情報を得る必要があります。
だいたい売ってるとこの商品情報の所に書いてあるので
わかると思います。
GoPro用だと、ほとんどN12P14だと思います。
これは14極という事です。
どうしてもわかんない場合は、自分で数えましょうwww
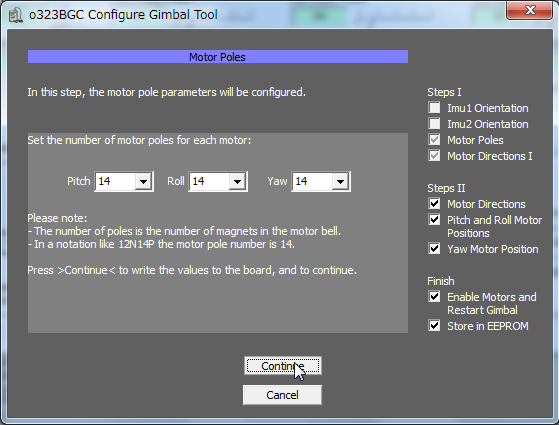
設定が終ったらContinueボタンを押します。
すると、すべてのモーターの方向の値が
「自動」に設定された事が通知されます。
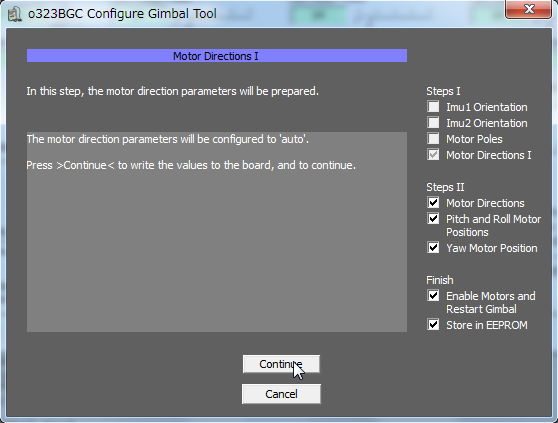
またContinueボタンを押します。
Steps Ⅱに進みます。
こういう画面がでてるはずです。

PIDの値が悪すぎると稀に失敗する時があるとか
色々書かれてますけど
とりあえず無視してContinueボタンを押します。
ステップⅡを機能させるにはモーターを動かす必要があるので
バッテリーを接続する必要があります。
GUIがチェックし、必要に応じてバッテリを接続するよう求めてきます。

この画面が出たら、STorM32にバッテリーを接続して下さい。
バッテリーは6~18V or 2~4Sまでです。
※追記
GLB製のボードは9~25V or 3~6Sらしい
バッテリーを接続したら、バッテリーのチェック
モーター&ジンバルの再起動、初期化が行われるので
NOMALモードになるまでジンバルは動かさないで下さい。
初期化がうまく行きNOMALモードになれば
ビープ音が鳴ると思います。
すると、全モーターの回転方向が決定されたと通知されます。
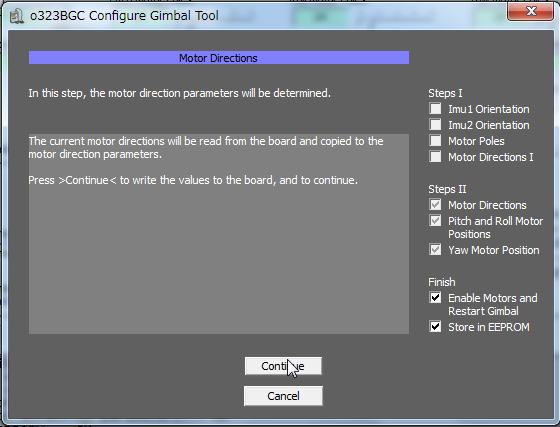
Continueボタンを押します。
続いて、ピッチとロールモータの起動位置が
決定されたと通知されます。

Continueボタンを押します。
次のような画面が現れますので
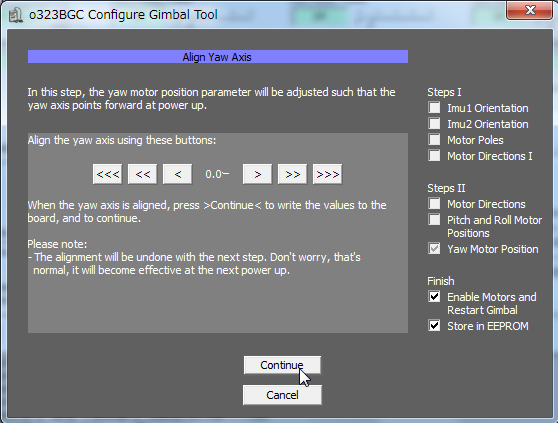
矢印みたいなボタンを使って、カメラが真正面を向くように
調整して下さい。
出来たら、Continueボタンを押します。
OKボタンを押すとジンバルの再起動と
EEPROMに設定した値が書き込まれます。
必ずOKボタンは押してくださいね。
そうしないと、今まで設定した事が水の泡になります。
また最初からと言う事です。
一連の流れ
とりあえずこれで基本設定は終わりです。
あくまで基本設定は!です。
このあとは、PID調整や細かい部分なども設定して
自分好みの動きにしていく必要があります。
今回はここまで。