AF計をAEM UEGOワイドバンド空燃比計 AF計(A/F計) 30-0300ハイレスポンス LSU4.9にしました。

これにしたのはCANの出力機能があるからです。
CANからAF計の空燃比をLINKに入力することができます。
CANはたった2本のケーブルに枝葉のようにに複数の機器を接続して情報の入出力出来ます。
現状AFRはアナログ入力を使っていますが、4系統すべて使ってしまっていて、拡張性がありません。
追加で付けたいアナログセンサーがあるので空けたいので、AFRをCANに移行します。
設定は以下のサイトが丁寧に記載されていて参考にしました。
が、、、上手くいかず苦労しました。
なので、nanja流でも手順を残します。
配線は基本的にLINKのマニュアル通りです。
CAN-HとCAN-Lを接続するだけです。
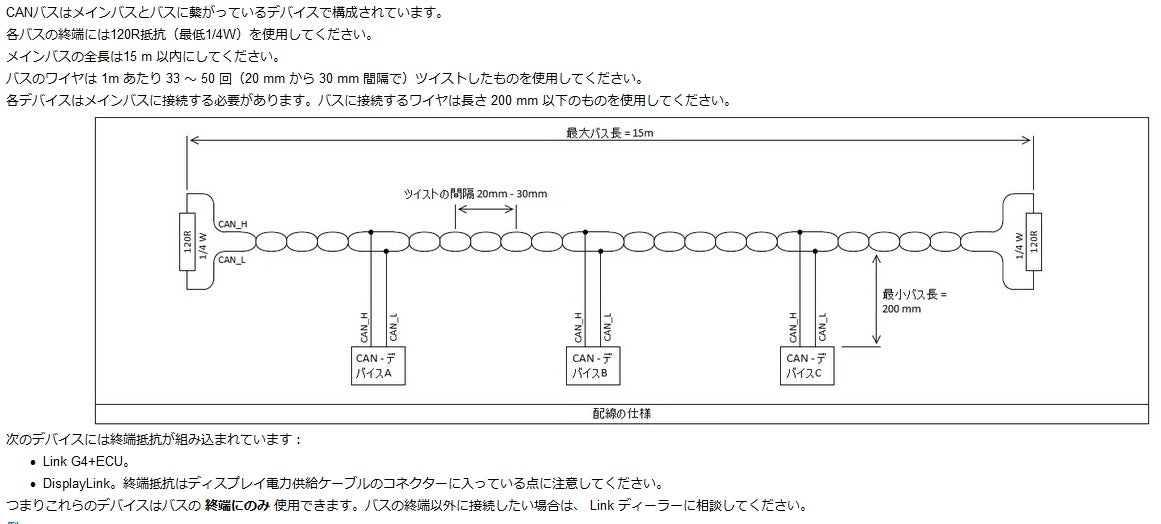
当初設定時はうまく行かず、いろいろ試したのですが、結果的には終端抵抗、ターミネータの120オームの抵抗は
合っても、無くてもCANは出来ました。

終端にOBD2が合っても、無くても関係なしです。
たった1個しか使わないに120オームの抵抗を50も買ってしまった。。。また余剰な資材を確保してしまった。
LINK自体の設定です。

CAN設定-モード

MonsoonはCANの経路1つなのでCANモジュールは「CAN1」、
ビットレートは500kbit/s
OBDはISO15765onCAN1でもOFFでも。
チャネルは1にreceiveを設定(AEMからの受信のため。)


CAN IDは384 フォーマットは拡張
AEMの設定でCANはID1に設定していますので、0x0000180です。
0x0000180(16進数)なので、10進数に変換すると384になります。

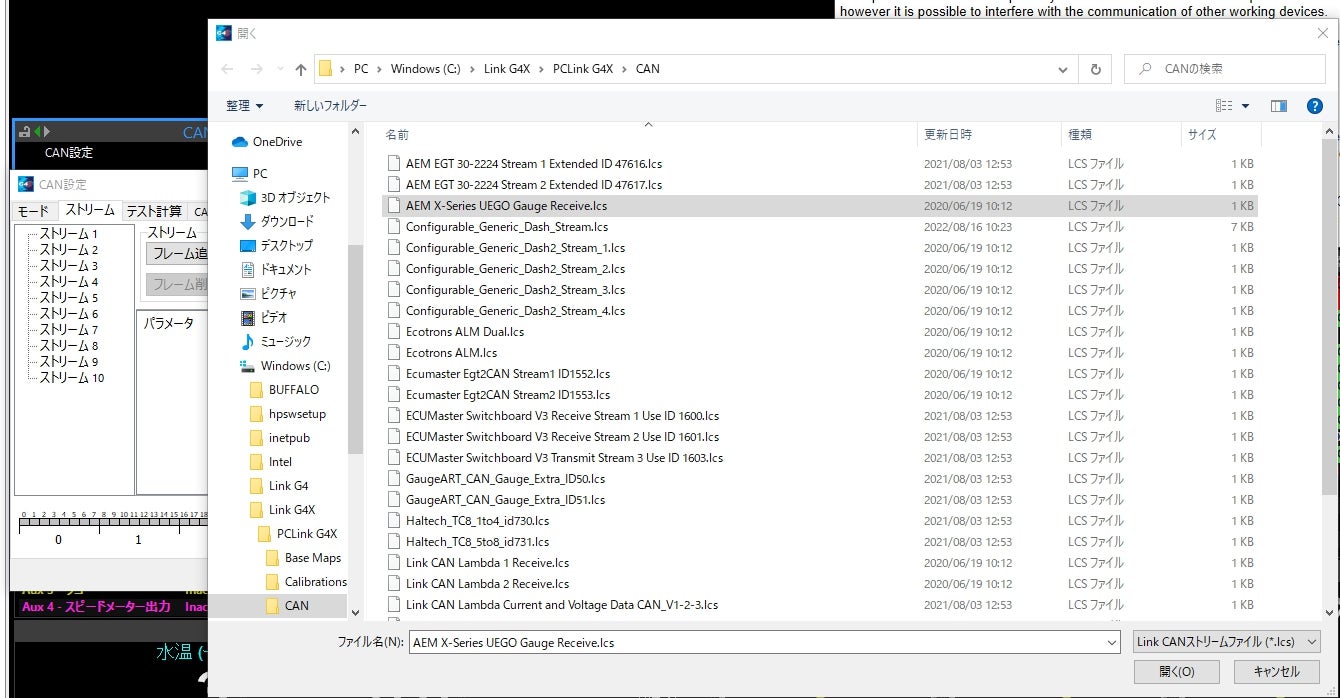
フレーム読み込みから以下のファイルを選択。
AEM X-Series UEGO Gauge Receive.lcs
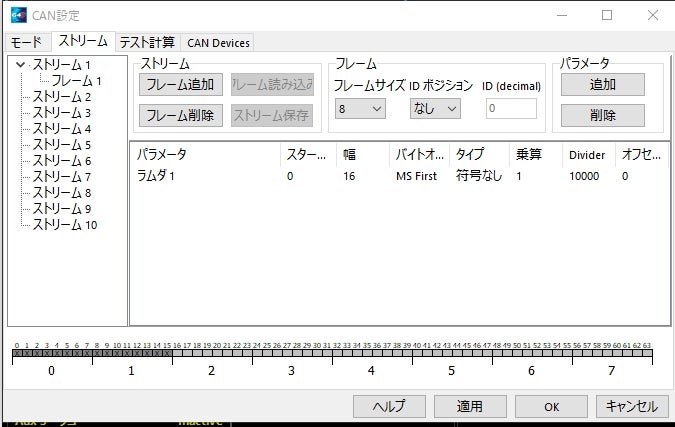
ストリーム1の配下にフレーム1が追加されます。
ここまでは順調に出来ました。
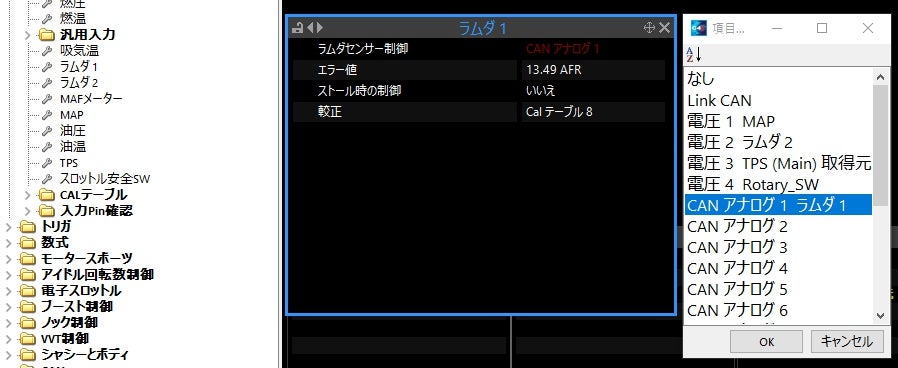
CANのラムダを「ラムダ1」に割り当てます。
アナログ入力のラムダ1にCANを割り当てます。
「CANアナログ1」に設定しました。
が、これは間違いでした。
ラムダ1がCAN入力ですが、不定期な周期で値が入ったり、エラーの10になったりの繰り返し。
CANアナログ1とチャネル1が紐づいていると思っていたのですが、違いました。

正しくは「Link CAN」でした。
マニュアルに書いてありました。
「Lambda 1
This is the Wideband Air Fuel Sensor input and controls the Lambda 1 runtime value. Link Fury ECUs have an on-board sensor which is selected with the 'Internal' Option. To use the value from a CAN Lambda Sensor select 'Link CAN', to use the CAN output of a different aftermarket sensor controller select an appropriate CAN Analog input and configure the user CAN to suit. More information on Lambda inputs and using CAN as a Lambda input can be found here.
」
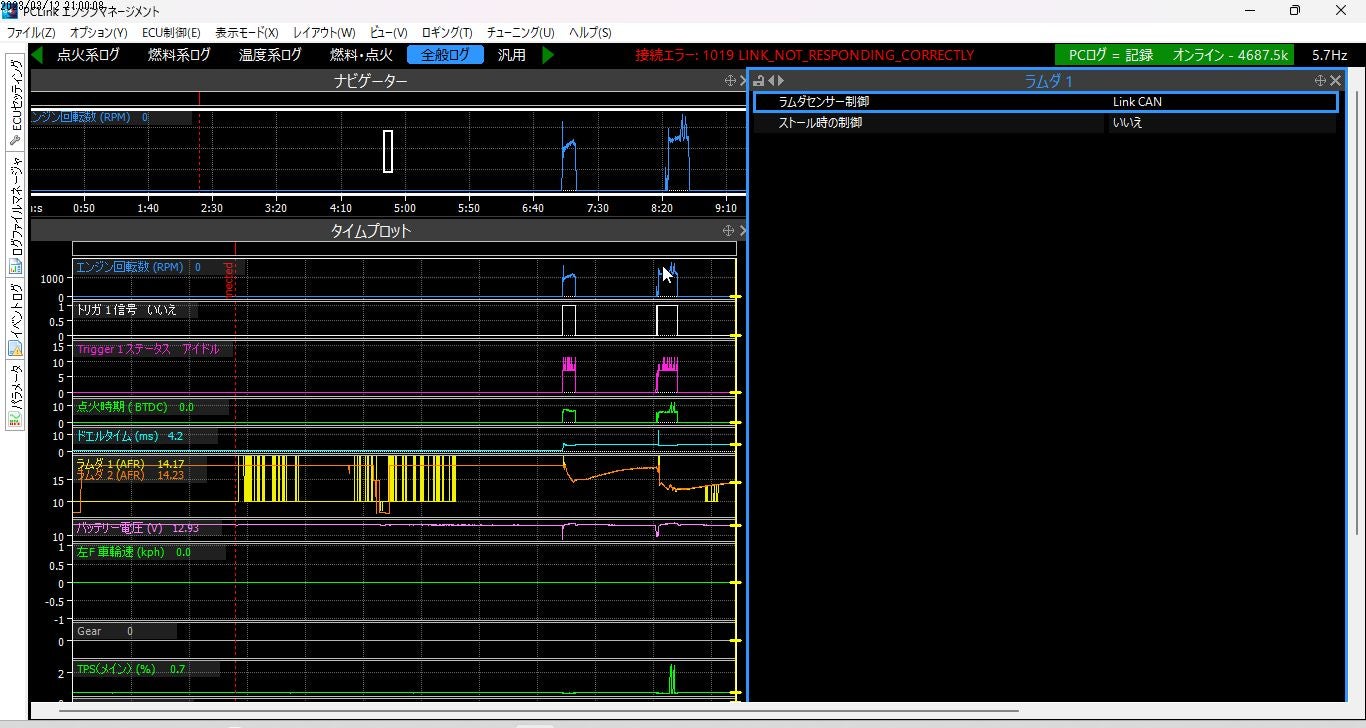
はい、これでラムダ1とラムダ2(こっちは通常のアナログ電圧の入力)。
基本的に値はほぼ同じですが、CANの方が更新頻度が高くて、表示用のメーターと同じ値のようです。
というわけで、アナログ入力のラムダ2は使用せず、MAPセンサーの2つ目にアサインしました。
これで冬の宿題の一個は片付きました。