#DB接続
use DBI;
my $database = 'database-database';
my $host = 'mysql.db.sakura.ne.jp';
my $userid = 'ID';
my $pass = 'PASS';
my $data_source = "dbi:mysql:database=$database;host=$host";
my $dbh = DBI->connect($data_source, $userid, $pass);
#DBはutf8を宣言
$dbh->do("set names utf8");
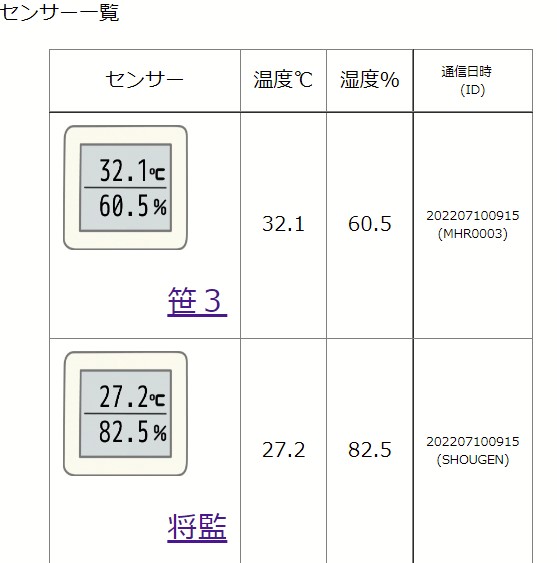
#sensorテーブルを全部読み込み
my $sth = $dbh->prepare("select sensor_id, sensor_name, sensor_ondo, sensor_shitudo, last_update from sensor order by display_order;");
$sth->execute;
while True :
val = 0
min = 4096
max = 0
for i in range(50):
total = 0
count = 0
for i in range(240):
val = adc0.read()
total = total + val
count = count + 1
try :
ave = total / count
if( min > ave) :
min = ave
if( max < ave) :
max = ave
except:
print("dev-err")
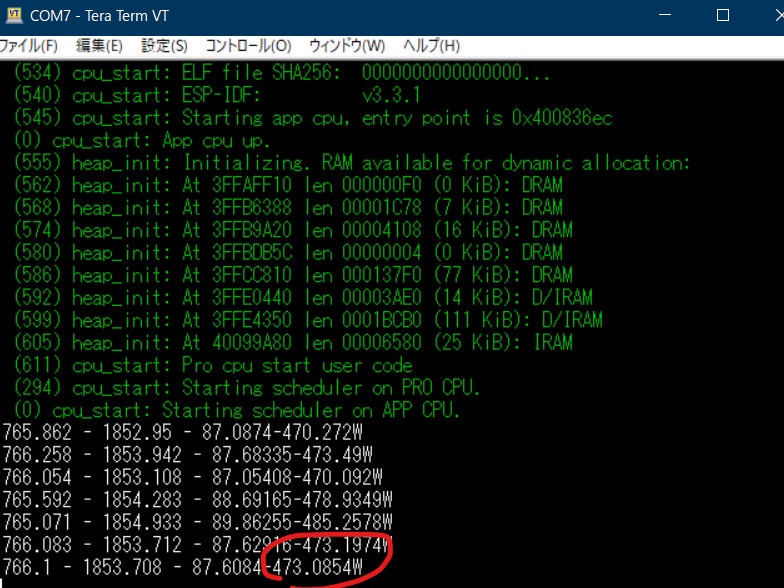
pp = max - min
if pp<3.3 :
pp=0
else :
pp=pp-0.0
w = pp*5.4
print(str(min)+" - "+str(max)+" - "+str(pp)+"-"+str(w)+"W")