oracleメモ。Export/Import/DIRECTORY指定
なんか急遽データベースであるOracleのお仕事来そうなので、日曜返上でお勉強です。
http://www.ac.cyberhome.ne.jp/~coloration-style/Oracle/Oracle19c_Install.html
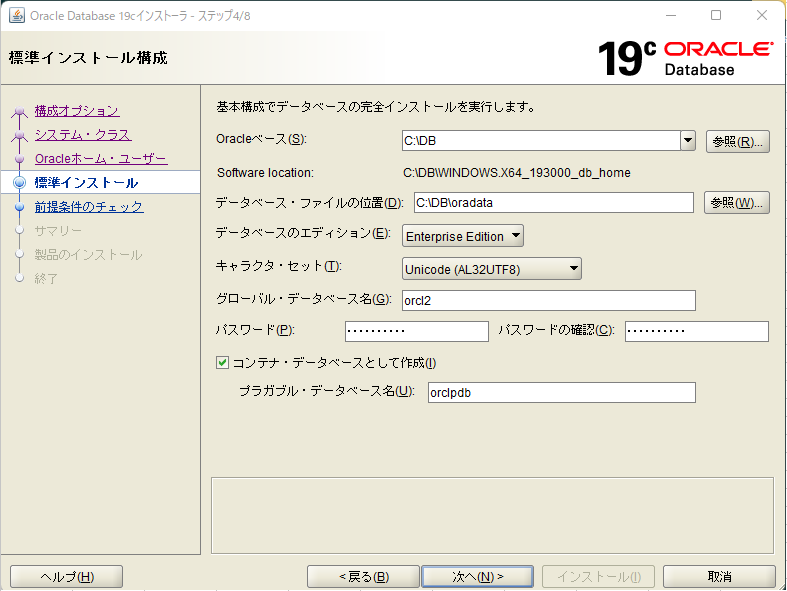
とかに従ってインストール。
C:¥DB¥WINDOWS.X64_193000_db_homeに展開したファイルを配置して
setup.exeを実行
完了!!
でsqlplusが動かなくて試行錯誤
・・・
結果、
C:¥DB¥WINDOWS.X64_193000_db_home¥network¥admin
ORACLEHOMEの中のadminの中のファイル
sqlnet.oraの1行変更すれば治る。
変更前
NAMES.DIRECTORY_PATH= (TNSNAMES, EZCONNECT)
変更後
NAMES.DIRECTORY_PATH= (TNSNAMES)
と変更すること。
自分の場合は試行錯誤の中でorclで作ってからorcl2を作っているのでsqlplusのコマンドは
sqlplus sys@orcl2 as sysdba
pass=Mxxxxx1
となった。この後また変更することになるが。
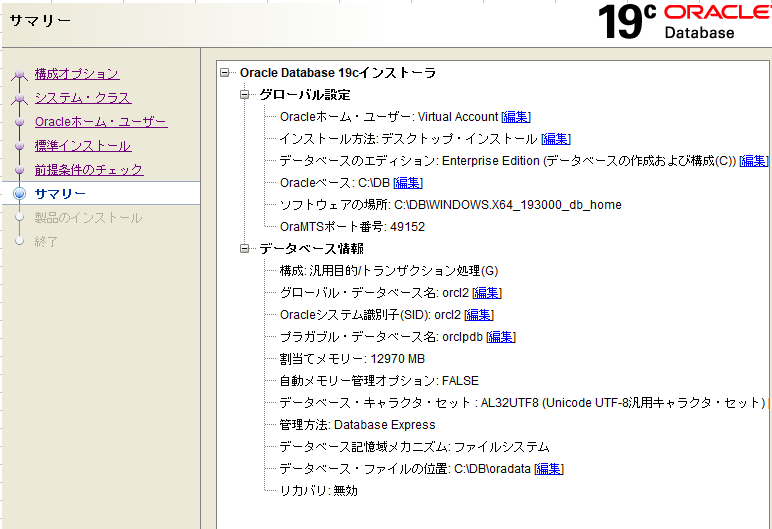
上記のセットアップをした場合に
oracleにDBは作られているっぽいので、create tableを実施。
CREATE TABLE t1 ( k1 VARCHAR2(10) NOT NULL, k2 VARCHAR2(50), k3 NUMBER(1,0) ) ;
INSERT INTO t1 ( k1, k2, k3) VALUES ( 'tokyo', 'sibuya', 1) ;
commit work;
select * from t1;
ここでまた試行錯誤・・・
expdpのテストをしたいんですけど。
expdpすると、sysではログインできないとか、
ユーザー追加すると、ユーザー登録できなかったりで、
試行錯誤。
・・・
調べた結果
pdb=プラガブル・データベースというキーワードにたどり着きまして。
google先生によると
上でインストールしたときにプラガブルデータベース使うとしたらしく。
不要な新機能に振り回される。

sqlplusの起動もプラガブル
sqlplus sys@orclpdb as sysdba
startupでプラガブルを起動
startup
それでやっと、
ユーザ追加成功
CREATE USER miha identified by Mxxxxx1
権限追加
grant connect to miha;
grant ALL PRIVILEGES TO miha;
GRANT READ ON DIRECTORY DIR1 TO miha; DIR1は後で出てくる。このタイミングではエラーになるかも
GRANT WRITE ON DIRECTORY DIR1 TO miha; DIR1後で出てくる。このタイミングではエラーになるかも
作ったユーザーで再接続
sqlplus miha/Mxxxxx1@orclpdb
テーブル作って
CREATE TABLE t1 ( k1 VARCHAR2(10) NOT NULL, k2 VARCHAR2(50), k3 NUMBER(1,0) ) ;
CREATE TABLE t2 ( k1 VARCHAR2(10) NOT NULL, k2 VARCHAR2(50), k3 NUMBER(1,0) ) ;
データインサート
INSERT INTO t1 ( k1, k2, k3) VALUES ( 'tokyo', 'sibuya', 1) ;
INSERT INTO t1 ( k1, k2, k3) VALUES ( 'aomori', 'hirosaki', 1) ;
INSERT INTO t2 ( k1, k2, k3) VALUES ( 'hokkaido', 'hakodate', 1) ;
INSERT INTO t2 ( k1, k2, k3) VALUES ( 'iwate', 'morioka', 1) ;
commit work;
そんでセレクトしてみておく。
SELECT
select * from t1;
□ここから先が元々やりたかったexport
exp miha/Mxxxxx1@orclpdb file=tableexp.dmp rows=y tables=(users.t1)
□export先のDIRECTORY指定
CREATE DIRECTORY DIR1 as 'C:¥tmp'; ←深い場所にしてしまうとエラーになるぞなんで?
DROP DIRECTORY DIR1;
SELECT * FROM ALL_DIRECTORIES;
□DIRECTORYを使ってexport
expdp miha/Mxxxxx1@orclpdb tables=t1,t2 directory=DIR1 dumpfile=data.dmp logfile=data.log
□表は削除しておく(表があるとエラーになるので)
drop table t1;
drop table t2;
□DIRECTORYを使ってimport
impdp miha/Mxxxxx1@orclpdb tables=t1,t2 directory=DIR1 table_exists_action=replace dumpfile=data.dmp logfile=dataimp.log
これで一通りexportからimportまで出来るようになった。

 通常 周波数を0.1MHz単位で変更
通常 周波数を0.1MHz単位で変更 周波数微調整 周波数を0.01MHz単位で変更
周波数微調整 周波数を0.01MHz単位で変更 ステレオモノラル調整
ステレオモノラル調整 ボリューム調整
ボリューム調整