ツインモーターギヤーボックス+ESP32+モータードライバーBD6222HFPで遠隔操作のリモコンカー
リモコンカー台座。タミヤのツインモーターギヤーボックスだと思う。
前の記事でカメラの向きを変える為の台座?みたいなものを作っておりましたが。
https://ameblo.jp/fc2miha/entry-12833773028.html
首を振るだけではつまらなくなり。
リモコンカー的なものを作ってみました。
ずっと前にモーターを回す実験をやった時のモータードライバーBD6222HFPが
ありましたので、これを使います。
あと、動力部にはタミヤ 楽しい工作シリーズ No.97
ツインモーターギヤーボックス だと思う。
これらとESPを組み合わせて作っていきます。
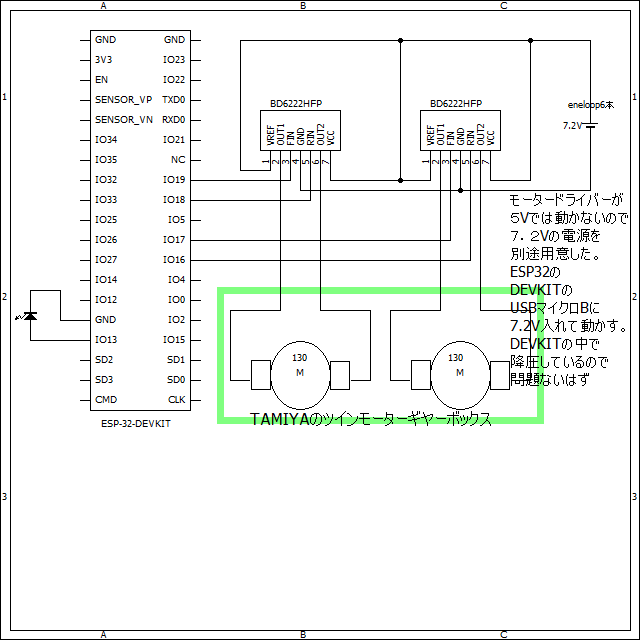
■接続構成
ESP32---BD6222HFP---ツインモーターギヤーボックス
となっており、
ESPのWIFI接続でESP内にWEBサーバーを開いて、
その画面から操作することで遠隔地からリモコンカーの操作が可能になるっていうやつ。
■モータードライバー

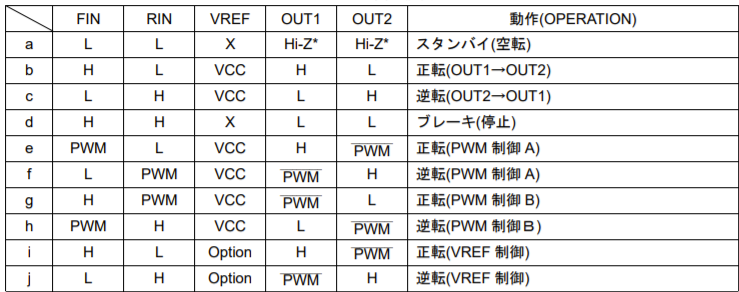
俺的解釈。
FINとRINの入力によって前に回したり後ろに回したりする事ができる。
Fがフロント、Rがリヤとかってに解釈。
FにHighでRにLowにすると、前に進む
RにHighでLにLowにすると、後ろに進む
で、
両方Lowでなにもしない。電源OFFになるので、回っている場合は惰性で回り続ける
急に止まりたいときは、急ブレーキの特殊コマンドFR両方Highを与える。
という所とみました。
上記はa~dまでの動きでだいたい思ったことはできるのであと使わないけど。
eから下はゆっくり走るとかできるんだと思います。
■回路
■プログラム
上記の通り
モータードライバーのコマンドが
制御信号2本でできるので、そこのGPIOを制御するだけの簡単なものです。
また、プログラムがblogで切られるので抜粋です
全体は
https://drive.google.com/file/d/16r5zl1-g-W9wNNi34aSM_K4LeMp21irX/view?usp=sharing
wait_sec = 0.1
wait_sec2 = 0.3
m1_1=Pin(16,Pin.OUT)
m1_2=Pin(17,Pin.OUT)
m2_1=Pin(18,Pin.OUT)
m2_2=Pin(19,Pin.OUT)
def motor_stop( ) :
m1_1.value(1)
m1_2.value(1)
m2_1.value(1)
m2_2.value(1)
time.sleep(0.2)
m1_1.value(0)
m1_2.value(0)
m2_1.value(0)
m2_2.value(0)
motor_stop()
def zenshin(flag, conn):
#モーター制御
m1_1.value(1)
m1_2.value(0)
m2_1.value(1)
m2_2.value(0)
time.sleep(wait_sec2)
motor_stop()
def koutai(flag, conn):
#モーター制御
m1_1.value(0)
m1_2.value(1)
m2_1.value(0)
m2_2.value(1)
time.sleep(wait_sec2)
motor_stop()
#
def hidari(flag, conn):
#モーター制御
m1_1.value(1)
m1_2.value(0)
m2_1.value(0)
m2_2.value(1)
time.sleep(wait_sec)
motor_stop()
#
def migi(flag, conn):
#モーター制御
m1_1.value(0)
m1_2.value(1)
m2_1.value(1)
m2_2.value(0)
time.sleep(wait_sec)
motor_stop()
#
■動いている様子