■環境構築
Raspbianの最新版(Raspbian Stretch with desktop and
recommended software)をダウンロードして32GByteのマイクロSDに焼いて
RaspberryPi3にセットして起動、初期セットアップを完了。
まっさらの状態から以下のコマンドを入れていきます。
pip3 install matplotlib
sudo apt install libatlas-base-dev
sudo pip3 install opencv-python
sudo pip3 install opencv-contrib-python
sudo apt-get update
sudo apt-get install libhdf5-dev
sudo apt-get update
sudo apt-get install libhdf5-serial-dev
sudo apt-get install libjasper-dev
sudo apt-get install libqt4-test
sudo pip3 install chainer
sudo pip3 install chainercv
■LogitecのWebカメラの画像をリアルタイム表示
ラズパイカメラからのリアルタイム入力できると良いなーと思っておりましたが
cv2.VideoCapture(0)ではラズパイカメラをそのまま認識できない様なので
LogitecのWebカメラから画像を入力します。
パイカメラからの入力はプログラムを修正すれば行けると思うので後日。
■Webカメラの画像をリアルタイム表示実行
python3 Test_Cam.py 0
■実行結果
19FPSで表示できております。
パソコンでも30FPSぐらいでしたのでラズパイなかなかやるじゃんという感じです。
■実行
python3 yolo3.py 0
■実行結果
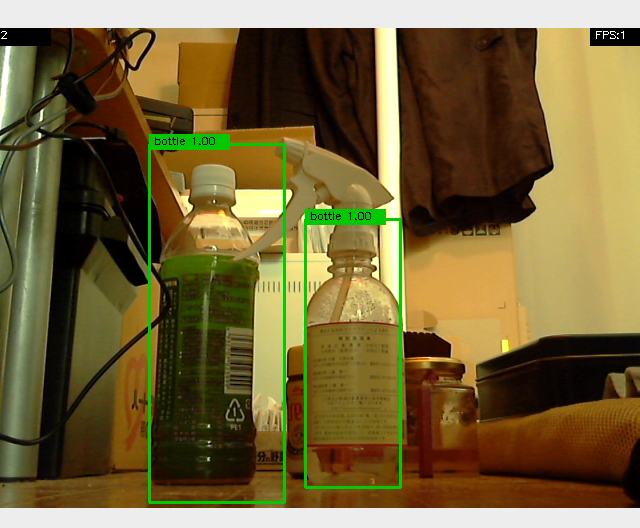
1画像につき55秒かかっております。
さすがにラズパイではキツイか?とも思いますが
ラズパイ用のGPUってあるんでしょうかね?
時々生き物や物体の数を数える程度であればなんとか使えるでしょう。
ちなみに、ラズパイでの実行ではCPU食い過ぎの為なのかもしれませんが
「強制終了」のメッセージとともに中断することがあるようです。
■ソース
ソースは昨日まで作っていたものと同じです。
pythonで作るとWindowsでもラズパイでもそのまま動いて便利ですね。
・Test_Cam.py
import argparse
import cv2
from timeit import default_timer as timer
def main():
parser = argparse.ArgumentParser()
parser.add_argument('video')
args = parser.parse_args()
if args.video == "0":
vid = cv2.VideoCapture(0)
else:
vid = cv2.VideoCapture(args.video)
if not vid.isOpened():
raise ImportError("Couldn't open video file or webcam.")
# Compute aspect ratio of video
vidw = vid.get(cv2.CAP_PROP_FRAME_WIDTH)
vidh = vid.get(cv2.CAP_PROP_FRAME_HEIGHT)
vidar = vidw / vidh
print(vidw)
print(vidh)
accum_time = 0
curr_fps = 0
fps = "FPS: ??"
prev_time = timer()
frame_count = 1
while True:
ret, frame = vid.read()
if ret == False:
print("Done!")
return
# Resized
im_size = (640, 480)
resized = cv2.resize(frame, im_size)
# =================================
# Image Preprocessing
# =================================
# =================================
# Main Processing
result = resized.copy() # dummy
# result = frame.copy() # no resize
# =================================
# Calculate FPS
curr_time = timer()
exec_time = curr_time - prev_time
prev_time = curr_time
accum_time = accum_time + exec_time
curr_fps = curr_fps + 1
if accum_time > 1:
accum_time = accum_time - 1
fps = "FPS:" + str(curr_fps)
curr_fps = 0
# Draw FPS in top right corner
cv2.rectangle(result, (250, 0), (300, 17), (0, 0, 0), -1)
cv2.putText(result, fps, (255, 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.35, (255, 255, 255), 1)
# Draw Frame Number
cv2.rectangle(result, (0, 0), (50, 17), (0, 0, 0), -1)
cv2.putText(result, str(frame_count), (0, 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.35, (255, 255, 255), 1)
# Output Result
cv2.imshow("Result", result)
# Stop Processing
if cv2.waitKey(1) & 0xFF == ord('q'):
break
frame_count += 1
if __name__ == '__main__':
main()
・yolo3.py
import time
import argparse
import matplotlib.pyplot as plt
import cv2
import numpy as np
from timeit import default_timer as timer
import chainer
from chainercv.datasets import voc_bbox_label_names
from chainercv.datasets import coco_bbox_label_names
from chainercv.links import YOLOv3
#色のテーブル 150まで対応
label_colors = (
(120, 120, 120),
(180, 120, 120),
(6, 230, 230),
(80, 50, 50),
(4, 200, 3),
(120, 120, 80),
(140, 140, 140),
(204, 5, 255),
(230, 230, 230),
(4, 250, 7),
(224, 5, 255),
(235, 255, 7),
(150, 5, 61),
(120, 120, 70),
(8, 255, 51),
(255, 6, 82),
(143, 255, 140),
(204, 255, 4),
(255, 51, 7),
(204, 70, 3),
(0, 102, 200),
(61, 230, 250),
(255, 6, 51),
(11, 102, 255),
(255, 7, 71),
(255, 9, 224),
(9, 7, 230),
(220, 220, 220),
(255, 9, 92),
(112, 9, 255),
(8, 255, 214),
(7, 255, 224),
(255, 184, 6),
(10, 255, 71),
(255, 41, 10),
(7, 255, 255),
(224, 255, 8),
(102, 8, 255),
(255, 61, 6),
(255, 194, 7),
(255, 122, 8),
(0, 255, 20),
(255, 8, 41),
(255, 5, 153),
(6, 51, 255),
(235, 12, 255),
(160, 150, 20),
(0, 163, 255),
(140, 140, 140),
(250, 10, 15),
(20, 255, 0),
(31, 255, 0),
(255, 31, 0),
(255, 224, 0),
(153, 255, 0),
(0, 0, 255),
(255, 71, 0),
(0, 235, 255),
(0, 173, 255),
(31, 0, 255),
(11, 200, 200),
(255, 82, 0),
(0, 255, 245),
(0, 61, 255),
(0, 255, 112),
(0, 255, 133),
(255, 0, 0),
(255, 163, 0),
(255, 102, 0),
(194, 255, 0),
(0, 143, 255),
(51, 255, 0),
(0, 82, 255),
(0, 255, 41),
(0, 255, 173),
(10, 0, 255),
(173, 255, 0),
(0, 255, 153),
(255, 92, 0),
(255, 0, 255),
(255, 0, 245),
(255, 0, 102),
(255, 173, 0),
(255, 0, 20),
(255, 184, 184),
(0, 31, 255),
(0, 255, 61),
(0, 71, 255),
(255, 0, 204),
(0, 255, 194),
(0, 255, 82),
(0, 10, 255),
(0, 112, 255),
(51, 0, 255),
(0, 194, 255),
(0, 122, 255),
(0, 255, 163),
(255, 153, 0),
(0, 255, 10),
(255, 112, 0),
(143, 255, 0),
(82, 0, 255),
(163, 255, 0),
(255, 235, 0),
(8, 184, 170),
(133, 0, 255),
(0, 255, 92),
(184, 0, 255),
(255, 0, 31),
(0, 184, 255),
(0, 214, 255),
(255, 0, 112),
(92, 255, 0),
(0, 224, 255),
(112, 224, 255),
(70, 184, 160),
(163, 0, 255),
(153, 0, 255),
(71, 255, 0),
(255, 0, 163),
(255, 204, 0),
(255, 0, 143),
(0, 255, 235),
(133, 255, 0),
(255, 0, 235),
(245, 0, 255),
(255, 0, 122),
(255, 245, 0),
(10, 190, 212),
(214, 255, 0),
(0, 204, 255),
(20, 0, 255),
(255, 255, 0),
(0, 153, 255),
(0, 41, 255),
(0, 255, 204),
(41, 0, 255),
(41, 255, 0),
(173, 0, 255),
(0, 245, 255),
(71, 0, 255),
(122, 0, 255),
(0, 255, 184),
(0, 92, 255),
(184, 255, 0),
(0, 133, 255),
(255, 214, 0),
(25, 194, 194),
(102, 255, 0),
(92, 0, 255),
(0, 0, 0)
)
def main():
parser = argparse.ArgumentParser()
parser.add_argument('--gpu', type=int, default=-1)
parser.add_argument('--pretrained-model', default='voc0712')
parser.add_argument('--class_num', default=20)
parser.add_argument('--class_list', default=0)
parser.add_argument('video')
args = parser.parse_args()
#
#パラメータ解析
# python yolo3.py 0
# デフォルトではvoc0712のモデルをダウンロードして来ます。認識できるのは20種類
#
# python yolo3.py --pretrained-model yolov3.weights.npz --class_num 80 --class_list yolov3.list 0
# --pretrained-model
# darknet2npz.pyで変換した学習済みモデルyolov3.weights.npzを指定
# --class_num
# 上記学習済みモデルのクラス数
# --class_list
# 上記学習済みモデルのクラス名一覧 1行に1クラス
# ビデオ
# WEBカメラの場合は0
# 動画ファイルの場合はファイル名
#
if args.pretrained_model=='voc0712' :
label_names = voc_bbox_label_names
model = YOLOv3(20, 'voc0712')
else :
print(args.class_list)
if args.class_list==0 :
label_names = coco_bbox_label_names
else:
f = open(args.class_list, "r")
name_list = []
for line in f:
line = line.strip()
name_list.append(line)
f.close()
label_names = name_list
model = YOLOv3(n_fg_class=int(args.class_num), pretrained_model=args.pretrained_model)
#GPU対応
# CPUなら省略
# GPUなら0
if args.gpu >= 0:
chainer.cuda.get_device_from_id(args.gpu).use()
model.to_gpu()
#
#対応しているクラス名一覧を表示する
#
for name in label_names:
print(name)
#
#WEBカメラまたは動画ファイルを開く
#
if args.video == "0":
vid = cv2.VideoCapture(0)
else:
vid = cv2.VideoCapture(args.video)
if not vid.isOpened():
raise ImportError("Couldn't open video file or webcam.")
# Compute aspect ratio of video
vidw = vid.get(cv2.CAP_PROP_FRAME_WIDTH)
vidh = vid.get(cv2.CAP_PROP_FRAME_HEIGHT)
# vidar = vidw / vidh
print(vidw)
print(vidh)
accum_time = 0
curr_fps = 0
fps = "FPS: ??"
prev_time = timer()
frame_count = 1
while True:
ret, frame = vid.read()
if ret == False:
time.sleep(5)
print("Done!")
return
# BGR -> RGB
rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
# Result image
result = frame.copy()
# (H, W, C) -> (C, H, W)
img = np.asarray(rgb, dtype = np.float32).transpose((2, 0, 1))
# Object Detection
bboxes, labels, scores = model.predict([img])
bbox, label, score = bboxes[0], labels[0], scores[0]
print("----------")
nPerson = 0
nBottle = 0
if len(bbox) != 0:
for i, bb in enumerate(bbox):
# print(i)
lb = label[i]
conf = score[i].tolist()
ymin = int(bb[0])
xmin = int(bb[1])
ymax = int(bb[2])
xmax = int(bb[3])
class_num = int(lb)
# Draw box 1
cv2.rectangle(result, (xmin, ymin), (xmax, ymax),
label_colors[class_num], 2)
# Draw box 2
# cv2.rectangle(result, (xmin, ymin), (xmax, ymax), (0,255,0), 2)
#text = label_names[class_num] + " " + ('%.2f' % conf)
text = label_names[class_num] + " " + ('%.2f' % conf)
print(text)
if(label_names[class_num] == 'person'):
nPerson = nPerson + 1
if(label_names[class_num] == 'bottle'):
nBottle = nBottle + 1
text_top = (xmin, ymin - 10)
text_bot = (xmin + 80, ymin + 5)
text_pos = (xmin + 5, ymin)
# Draw label 1
cv2.rectangle(result, text_top, text_bot,
label_colors[class_num], -1)
cv2.putText(result, text, text_pos,
cv2.FONT_HERSHEY_SIMPLEX, 0.35, (0, 0, 0), 1)
# Draw label 2
# cv2.rectangle(result, text_top, text_bot, (255,255,255), -1)
# cv2.putText(result, text, text_pos,
# cv2.FONT_HERSHEY_SIMPLEX, 0.35, (0, 0, 0), 1)
print("==========")
print("Number of people : " + str(nPerson))
print("Number of bottle : " + str(nBottle))
# Calculate FPS
curr_time = timer()
exec_time = curr_time - prev_time
prev_time = curr_time
accum_time = accum_time + exec_time
curr_fps = curr_fps + 1
if accum_time > 1:
accum_time = accum_time - 1
fps = "FPS:" + str(curr_fps)
curr_fps = 0
# Draw FPS in top right corner
cv2.rectangle(result, (590, 0), (640, 17), (0, 0, 0), -1)
cv2.putText(result, fps, (595, 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.35, (255, 255, 255), 1)
# Draw Frame Number
cv2.rectangle(result, (0, 0), (50, 17), (0, 0, 0), -1)
cv2.putText(result, str(frame_count), (0, 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.35, (255, 255, 255), 1)
# Output Result
cv2.imshow("Yolo Result", result)
# Stop Processing
if cv2.waitKey(1) & 0xFF == ord('q'):
break
frame_count += 1
if __name__ == '__main__':
main()