2017年、市販のカーテン開閉器「モーニン」 を購入。
2019年、自作しましたが、作動音についてはほとんど改善できませんでした。
2021年 今回、いいモーターを見つけたので、また自作しました。
安価で小型で低速回転するモーターを、ネット(ブログや動画)で調べ、Amazonで購入しました。
「KKHMF 28BYJ-48 5V ステッピングモーター
+ ULN2003ステッピングモーター駆動テストモジュールボード
2個セット599円」
ESP32で動かすためのプログラムは、
https://stupiddog.jp/note/archives/1235
「ステッピングモーター(28BYJ-48)の動かし方 (ULN2003A使用)」からコピペさせてもらいました。自分では作れないので、助かります。
モーターの音ですが、静音というか、ほぼ無音です。
カーテン開閉器を組み立ててでカーテンを引いたとき、
モーター音よりもカーテンランナーの「カチャ、カチャ」という音のほうが気になるぐらいです。(静音のランナーを買おうかと思っています。)
1.ハードウェア

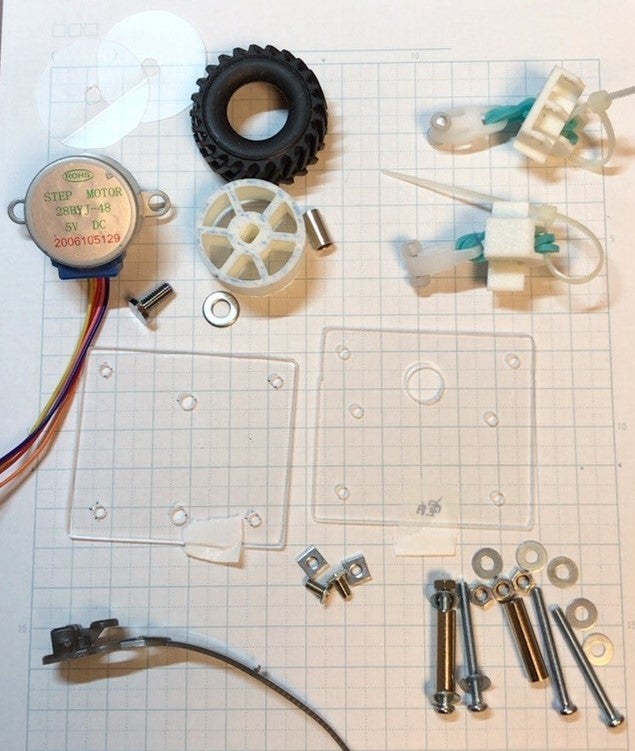
バラ部品

・ステッピングモータ 28BYJ-48
(モータ2個+ドライバ回路2個のセットで599円)
・ゴムタイヤ(タミヤ TRUCK TIRE SET 36mm DIA)
・PPワッシャ(クリアフォルダを円形にカット。
タイヤがアクリルと接触したときの摩擦を減らす)
・シリコン輪ゴム
・パッチリランナー(ホームセンターなどのカーテン売り場で。
とびこみランナー、SCランナー 等の商品名)
・タイヤとモータをつなぐ部品(3Dプリンタで自作)
・ランナーを保持する部品(3Dプリンタで自作)
・アクリル板にドリルで穴を開けたもの 2枚
・ほか ボルト、ナット、スペーサ、インシュロック など。
組立後の写真


制御回路 バラ部品

・ESP32-DevKitC ESP-WROOM-32開発ボード(秋月電子)
・ULN2003ステッピングモーター駆動テストモジュールボード
(Amazonでモータとセット販売)
・電源用マイクロUSBコネクタDIP化キット(秋月電子)
・ピンソケット (秋月電子)
モーターとドライバボードを接続する延長コード
・電線 (Amazonにて 耐熱通信機器用ビニル電線 白 10m H-PVC 0.65mm)
・XHコネクタ ベース付ポスト トップ型 5P B5B-XH-A(秋月電子)
・XHP-5XHコネクタ ハウジング (秋月電子)
・XHコネクタ ハウジング用コンタクト SXH-001T-P0.6 (秋月電子)
制御回路 接続後の写真

回路図(部品が少なく、ブレッドボードがなくてもいいです)

2.プログラム
.