お疲れ様です。
ドローン事業部です
今回のテーマは事故が起きたら ⁈です
⁈です
事故に関しては、「学科試験だけでなく実技試験」でもその詳細を問われます。
それでは早速、事故が起きた時の対応について、学んでいきましょう。
1事故を起こしたら
①慌てず落ち着いて、ケガの有無や、ケガの程度など、人の安全確認を第一に行う。
②機体が墜落した場合には、地上又は水上における交通への支障やバッテリーの発火等により周囲に危険を及ぼすことがないよう、機体が通電している場合は電源を切るなど速やかに措置を講ずる。
③事故の原因究明、再発防止のために飛行ログ等の記録を残す。
2通報先
無人航空機の飛行による人の死傷、第三者の物件の損傷、飛行時における機体の紛失又は航空機との衝突若しくは接近事案が発生した場合には、事故の内容に応じ、直ちに警察署、消防署、その他必要な機関等へ連絡するとともに、国土交通大臣に報告する。
3保険
無人航空機の保険は、車の自動車損害賠償責任保険(自賠責)のような強制保険はなく、すべて任意保険であるが、万一の場合の金銭的負担が大きいので、保険に加入しておくとよい。無人航空機の保険には、機体に対する保険、賠償責任保険などいろいろな種類や組合せがあるので自機の使用実態に即した保険に加入することが推奨される。
事故ってどのような状態を表すのでしょうか?
整理されている事故の分類について学んでいきましょう!
分類を知って理解しよう
3つの事故と4つの重大インシデントがあります。これらをまとめて事故等と表現します。
図1.事故と重大インシデントの分類について(国土交通省航空局参照)
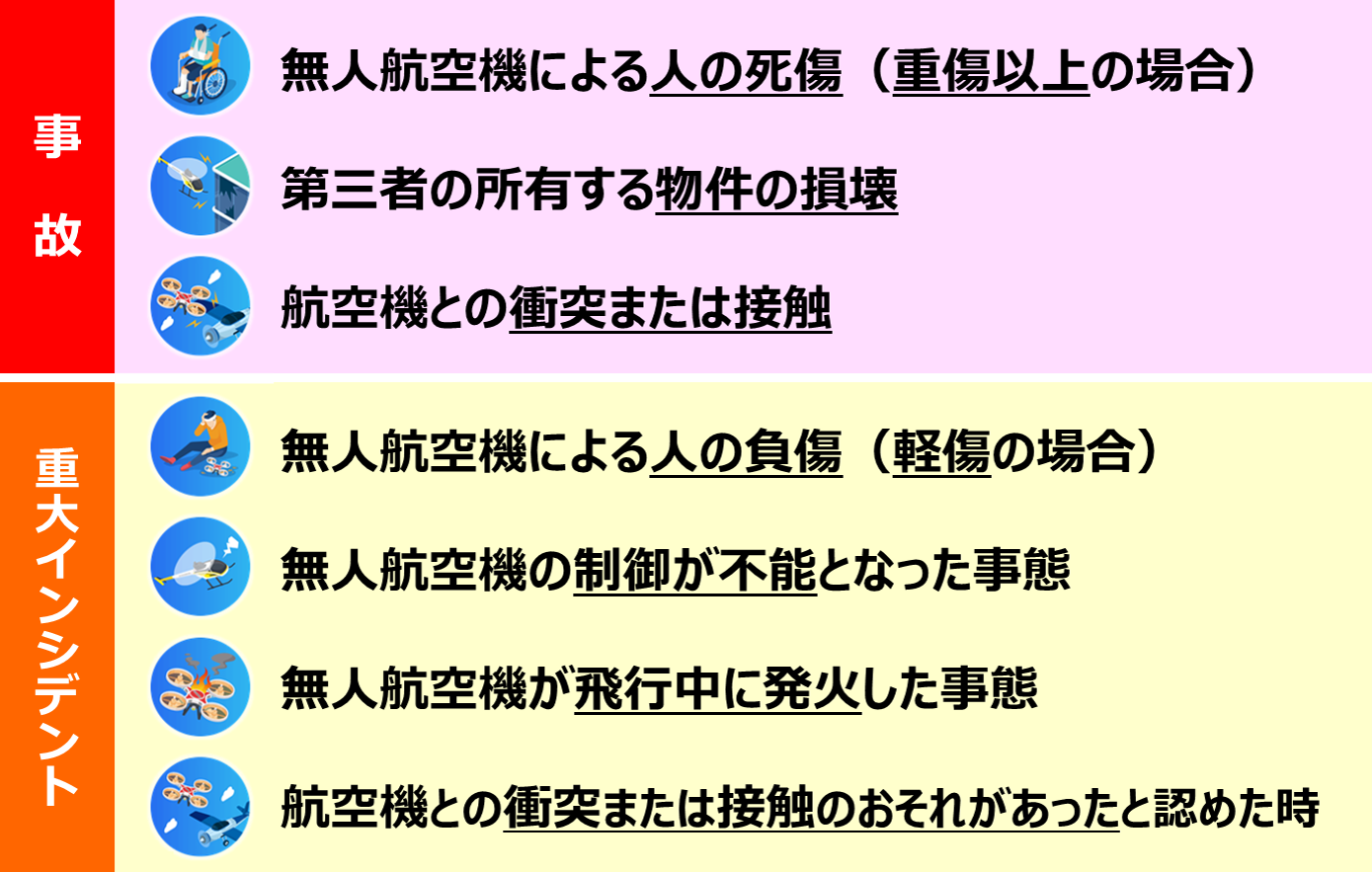
ふむふむ、人にドローンをぶつけた場合などは、負傷度合で呼び方が変わるんですね。
負傷者救護義務について学ぼう!
無人航空機の事故等の報告及び負傷者救護義務という制度があります。
この制度は、無人航空機に関する事故又は重大インシデントが発生した場合、当該無人航空機を飛行させる者が、ただちに飛行を中止し、負傷者を救護すると共に、当該事故又は重大インシデントが発生した日時及び場所などを国土交通大臣に報告しなければならない制度です。
※ 事故等の報告をしない又は虚偽の報告を行った場合、航空法第157条の10第2項に従い、30万円以下の罰金が科せられます。
※ 負傷者の救護など危険を防止するために必要な措置を講じない場合、航空法第157条の6に従い、2年以下の懲役又は百万円以下の罰金が科せられます。
増加傾向にあるドローンの事故
国土交通省航空局の資料によると、令和5年8月8日時点で報告されている事故・インシデント等の発生件数が令和4年から令和5年で約2.7倍となっています。
図2.事故・重大インシデント等の発生件数

ドローンの事故が起きた際、周りにいる人も知って欲しいこと
国土交通省航空局の資料によると、以下の対応を実施することでさらなる被害の拡大を防止できると記載されています。
図3.もし無人航空機が墜落した場合

以上です。今回は事故が起きた時の対応について学びました!
アンツエンジニアリングでは安全・安心なドローン運用を心がけています。
ではでは~














