前回の姿勢制御のメカニズムその2
の姿勢を制御するための
重要な3つの感覚システム
視覚・前庭・体性感覚の
前庭システムからの続きで
体性感覚システムになります。
[ 体性感覚システム ]
人間の感覚は
大きく分けて
○ 特殊感覚
視覚・聴覚・嗅覚・味覚・平衡感覚(前庭覚)
○ 体性感覚
触覚・温度感覚・痛覚・運動感覚(固有受容覚)
○ 内臓感覚
臓器感覚(空腹、尿意、便意、吐き気など)・内臓痛
の三つになります
体性感覚は
この三つに大別された感覚の
一つになります
また 五感の
視覚・聴覚・味覚・嗅覚・触覚
の内の触覚を含む感覚で
視覚、聴覚、嗅覚、味覚といった
頭部に局在する特殊感覚器と違い
全身に広がる感覚器になります
人間の感覚器官の中で
最も大きいものといえます
この体性感覚は
痛みや温度などを感じたり
身体の表面や内部の変化に反応し
適切な運動反応、動作や
姿勢のバランスの保持など
にも関与しており
とても大切な感覚器になります
また 脳の発育過程の中で
最も重要な土台となる
感覚器でもあります
体性感覚とは
体性感覚とは、 皮膚、粘膜、筋、腱、靭帯、骨膜、関節嚢などの身体を構成する組織にある受容器の興奮により生じる感覚のことをいい 受容器のある部位により表在 (皮膚) 感覚と深部感覚に分けられます。
表在 (皮膚) 感覚は、皮膚あるいは粘膜に存在する受容器により刺激を受け取る感覚のことをいい 触覚・圧覚・痛覚・温覚、冷覚などがあり 主に皮膚表面における感覚になります。
深部感覚は、骨膜・筋・腱・関節嚢・靱帯に存在する受容器により刺激を受け取る感覚 または その運動から起こる感覚のことをいい 手足などの相対的な位置(位置覚)や運動の方向(運動覚)がわかる運動感覚、物体などの振動刺激を感じる振動覚、骨 膜・筋・腱などに強い圧迫や持続的な刺激が加わって生じる痛みの感覚(深部痛覚)などがあり 主に身体内部の感覚になります。深部感覚には「意識性深部感覚」と「非意識性深部感覚」があり、意識性深部感覚は、身体動作時に身体の位置や方向、さらに運動の程度を認識・意識している大脳皮質が関わる感覚のものをいい、非意識性深部感覚は、身体動作時に意識にのぼらない繊細な関節や筋・腱の情報(筋肉や腱、皮膚がどれくらい伸びているか、関節がどれくらいの内圧・角度で動いているかなど)を小脳レベルで、常に筋肉や関節などの状態をチェックし、姿勢保持や関節運動の調整に働いている感覚のものをいいます。
また、体性感覚には 複合感覚という感覚が 有り 複合感覚は、触っている物が何なのか、手の中にコインが何枚入っているか、などの具体的な感覚情報を感じることができる感覚になります。複合感覚には、物を触ったり握ったりすることで そのものを判断出来るような感覚(立体認知覚)や、皮膚の上を二点同時に触れた事を認識出来る感覚(二点識別覚)、皮膚上に書写された文字を認識出来る感覚(皮膚書字覚)、物の重さなどを感じる感覚 (重量覚・重量認知覚)などがあり 表在、深部感覚などの複数の体性感覚が頭頂葉で統合し、感覚として変換されることで、重さ・形など複雑な感覚情報を具体的に認識することが出来る、知覚を含む高度な感覚になります。
[ 体性感覚 ]
1. 表在 (皮膚) 感覚(superficial sensation)
・触覚
・圧覚
・痛覚
・温度覚
・皮膚痛覚
2. 深部感覚(deep sensation)
・位置覚
・運動覚
・振動覚
・深部痛覚(圧痛)
3. 複合感覚(combined sensation)
・立体認知覚
・二点識別覚
・皮膚書字覚
・局在覚
・重量覚 (重量認知覚)
体性感覚の感覚受容器について
表在 (皮膚) 感覚受容器は
大きく分けて
・機械受容器 (メカノレセプター)
・温度受容器 (温度感覚器)
・自由神経終末 (侵害受容器)
の3つがあります。
◎ 機械受容器 (メカノレセプター)
外部の物体との接触や運動・姿勢の変化によって起こる圧迫・伸展など 組織の機械的変形を検出する細胞になり 動きや力を感じ、表在 (皮膚) 感覚の触覚や圧覚を受け持ちます。この機械受容器には、指腹部や手のひらなどの無毛部にメルケル細胞・マイスネル小体・パチニ小体・ルフィニ小体などの細胞と有毛部には毛包受容器、真皮や口腔にはクラウゼ小体(クラウゼ終棍) などの細胞があります。これらはずべて触覚・圧覚を感じる機械受容器ですが、感じることができる範囲(受容野)の広さと刺激に対する応答のなれ(順応速度)の速さなどがそれぞれ違い、異なる性質をもっております。
【備 考】
・体性感覚系の機械受容器の順応速度とは、刺激に対して慣れる速さのことをいい、順応速度が速いということはその刺激にすぐ慣れて感じにくくなることで、順応速度が遅いということはその刺激になかなか慣れずに敏感な状態が続くということになります。生体にとって危険な刺激に対する感覚ほど順応は遅く敏感な状態が続きます。順応速度は、順応速度が遅い「遅順応:Slowly Adapting(SA)」の受容器と 順応速度が速い「速順応性:Rapidly Adapting(RA)」の受容器に分かれます。
・体性感覚系の機械受容器の受容野とは、皮膚あるいは器官の一領域で、感覚処理系の個々の細胞が、外界あるいは体内に生じた刺激に対し、感覚受容器を通じて、反応することのできる範囲になり機械受容器の小さな受容野を「Ⅰ型:受容野が小さく、境界が比較的鮮明 」大きな受容野を「Ⅱ型:受容野が広く、境界が不明瞭 」とに分類されます。
⚫︎ メルケル細胞 (メルケル盤)
(順応速度:SA・受容野:Ⅰ型)
メルケル細胞とは、表皮と真皮の境界に位置しており、機械受容器の中で最も皮膚表面に存在しています。有毛皮膚と無毛皮膚の両方に存在しており、特に指先や唇などに多く存在します。メルケル細胞は、受容野が狭く、境界がはっきりしているため、繊細な触覚や物の感触・質感・手触りを感知します。また、刺激の位置を正確に特定する軽い圧力・識別性触覚に特に応答します。点字を読む際などに決定的な役割を果たします。
メルケル細胞は、刺激の開始時に高い頻度で応答し 静的な刺激にも応答し続け 軽い接触や圧力など皮膚の変形を感受する感覚受容器になります。
⚫︎ルフィニ小体 (ルフィニ終末)
(順応速度:SA・受容野:Ⅱ型)
ルフィニ小体とは、有毛皮膚と無毛皮膚の両方の表皮の深部に位置しており、皮膚の引っ張る方向や大きさの検出、と皮膚と深部組織との間の緊張の検出をしています。この受容器は、皮膚の押し込みよりも引っ張りに強く応答するため、特に手で把握された大きな対象物の形などに感受性があります。また、関節内の皮膚の引っ張りや変形を検出することで、指やその他の関節の運動を符号化することができるため、運動感覚(関節運動)を制御する上で重要な器官になります。これにより物を握る時の強さを自動的にコントロールすることが出来ると考えられています。掌や足の裏に多く存在し、触圧覚情報の他に温感受容器としての役割も持っています。
ルフィニ小体は、静的な刺激にも応答し続け 関節内の皮膚の伸長や変形を感受する感覚受容器になります。
⚫︎ マイスネル小体 (マイスナー小体)
(順応速度:RA・受容野:Ⅰ型)
マイスネル小体とは、手掌、足底、手指先、足指先や唇、舌尖などの無毛皮膚に存在し、皮膚の中でも真皮と表皮の境界である皮膚の浅層の真皮乳頭に位置しております。繊細な触覚や物の感触・質感・手触り・圧力や低周波の振動などを感知します。
マイスネル小体は、動的な刺激に応答し低周波振動の感度が高く触覚情報を処理する感覚受容器になります。
⚫︎ パチニ小体
(順応速度:RA・受容野:Ⅱ型)
パチニ小体とは、無毛皮膚と有毛皮膚の両方に存在し、皮下組織や深部組織に存在しており、皮膚や粘膜の深層、骨膜、関節包、内臓、生殖器などに見られ、あらゆる圧の変化と高周波振動を感知しています。
パチニ小体は、動的な刺激に応答し 高周波振動の感度が高く圧の変化を感受する感覚受容器になります。
⚫︎毛包受容器 (柵状神経終末)
(順応速度:速い)
毛包受容器とは、毛根には神経が豊富に分布し 毛包に神経終末が柵状に巻きついたものが毛包受容器になりす。
毛包受容器は、毛幹の傾きの変化・動き感知して、有毛部の触覚情報を処理する感覚受容器になります。毛は鋭敏な触覚器官になります。
⚫︎クラウゼ小体 (クラウゼ終棍)
(順応速度:非常に遅い)
クラウゼ小体とは圧覚や触覚、冷覚などを感知する感覚受容器になります。 真皮、結膜、口腔、鼻腔粘膜下に存在しています。
◎自由神経終末 (侵害受容器)
自由神経終末は、侵害受容器ともよばれ 痛みを感じる受容器になります。自由神経終末は、触覚、嗅覚、味覚などのように特殊な受容器や特定の構造を持たない受容器で、Aδ線維(有髄)、 C線維(無髄)などの末梢神経の神経線維の先端にあり 先端が細くなっている状態で存在しています。終末部が刺激を受容するための特殊の構造をしていないことから、この名前が付けられたとされています。この自由神経終末は、表皮、真皮、皮下組織をはじめ、筋肉の腱や靱帯、骨膜(骨を覆っている膜)、筋膜(筋肉を覆っている膜)、神経を覆う膜、椎間板の一部(正確には線維輪の外側2層まで)など多数の自由神経終末が存在しており、それらに異常が生じた場合に危険信号として 脳へと痛みを伝えます。自由神経終末 (侵害受容器)には、機械的侵害受容器、熱侵害受容器、冷侵害受容器、ポリモーダル侵害受容器などがあります。
【備 考】
有髄Aδ線維と無髄C線維とは
末梢神経の神経線維には、髄鞘の有無、線維の太さ、伝導速度、機能などにより、Aα(アルファ)・Aβ(ベータ)・Aδ(デルタ)・B・C線維に分類されており、Aδ線維とC線維は、そのうちの一つになります。
Aδ線維は、細い有髄神経で、伝導速度は、比較的速く、痛み感覚や冷感覚などの情報を伝える神経線維(感覚受容器)になり 部位のはっきりする鋭く速い痛み「チク」や「ピリ」などの鋭い痛みを伝えます。Aδ繊維は、C繊維より伝導速度が速いため、受傷した瞬間に鋭い痛みとして伝えられます。
「速く鋭い痛み」は、識別性、局在性がよく、同じ部位の刺激では最初に(速く)感じられるので「一次痛」といわれており 一次痛の侵害受容器には、強い機械的刺激のみに応じる機械的侵害受容器(高閾値機械受容器)などがあります。
C線維は、細い無髄神経で、伝導速度は、遅く、痛み感覚、温感覚などの情報を伝える神経線維(感覚受容器)になり 鈍く遅い痛み「ジンジンする」などの鈍い痛みを伝えます。
「遅く鈍い痛み」は、局在性が悪く、一次痛よりも後に感じられるので「二次痛」といわれており 二次痛の侵害受容器には、すべての侵害刺激(機械的、化学的、熱的)に応じるポリモーダル侵害受容器などがあります。
(図を参照)

◎ 温度受容器 (温度感覚器)
温度受容器とは、外界の温度に関する情報、温度刺激を感じ脳に伝える受容器で、温かさに反応する温覚の温受容器(温点)と、冷たさに反応する冷覚の冷受容器(冷点)とがあり 冷覚のほうが温覚に比べて受容器の数が多く、より表面に近く分布しています。この冷覚と温覚を司る温度受容器には、自由神経終末、クラウゼ小体(冷覚)、ルフィニ小体(温覚)とされています。また、温度覚は、大きく分けて 冷覚の「冷」と「涼」と温覚の「暖」と「暑」という4 つの異なる感覚があり、これらの感覚は、外気温あるいは身体と接触している対象物表面の温度と、通常約 32°Cの皮膚温度との温度差に起因して生じます。この温度覚は、皮膚温度の急激な変化にきわめて敏感ですが、体から熱を放出したり 体熱を保持したりするために行われる皮膚の血管開閉によって生じる皮膚温度の大きな変化には気がつかないといわれています。また、3 1 ~ 36°C の範囲内で皮膚温度がゆっくり変化する場合も、その変化に気がつかず、31°C以下の場合、温度低下に伴って生じる感覚は、「涼」から「冷」に移行し、最終的に10 ~ 15°C まで低下すると「痛み刺激」に変わり 36°C以上の場合は、温度上昇に伴って生じる感覚は、「暖」から「暑」に移行し、そして45°C以上に上昇すると「痛み刺激」に変わるといわれております。この「痛み刺激」には、自由神経終末が関与しています。
(図を参照)

深部感覚 (固有感覚)受容器
深部感覚とは、
身体の動きに関する情報を
伝えてくれる大切な感覚で
身体がどのように動き
変化しているのかを
知覚するために重要な
役割を担っています。
深部感覚の受容器には
関節の動きに関連する
受容器として
関節包にある
ルフィニ小体・パチニ小体と
関節靭帯にあるゴルジ受容器
などがあり
筋、腱に存在する受容器には
筋紡錘とゴルジ腱器官
などがあります。
また 深部痛覚は
筋の血管周囲や関節包にある
自由神経終末になり
意識性深部感覚の受容器は
パチニ小体、マイスネル小体
非意識性深部感覚の受容器は
筋紡錘、ゴルジ腱器官
になります
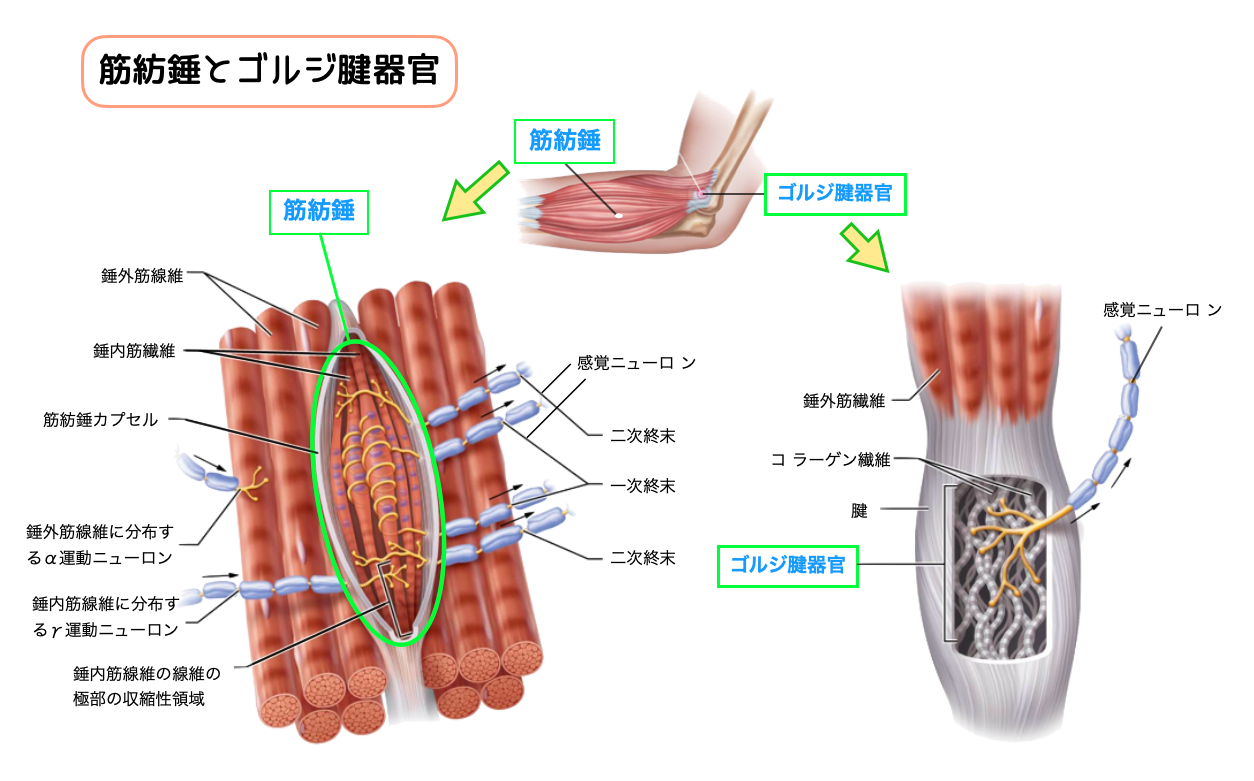
筋紡錘とは
筋紡錘は、錘内筋線維ともよばれ骨格筋(錘外筋線維)に内包されている感覚受容器で、筋線維に沿うように多数、配置されており、筋肉が伸ばされると筋紡錘も一緒に伸ばされます。この筋紡錘は、筋の長さとその変化速度を検出する感覚受容器になります。筋の長さの変化はその筋が関わる関節角度の変化と密接に連関しているため 非常に重要な感覚器になります。また、筋肉が急に伸ばされた際、筋肉を守るためにブレーキの役割も果たします。
ゴルジ腱器官(受容器)とは
ゴルジ腱器官は、骨格筋と腱の移行部にあるコラーゲン線維の皮膜に覆われた構造を持つ腱の感覚器になります。また、ゴルジ腱器官は、2種類の役目を持っており、一つは関節への負荷や曲がり方などを感知して運動感覚を得ることと、 もう一つは過剰な力によって腱や靱帯が損傷しないための安全装置になります。
(図を参照)
* 体性感覚に関わる原始/姿勢反射
基本的にどの原始/姿勢反射にも関わってきますが、皮膚感覚受容器でいくと特に口唇、舌、手掌、足底が 敏感で、様々な反射がみられます。
(口の周りや口唇を指で触ると、その方向に顔を向け、指を吸おうとする)
・足底把握反射・手掌把握反射
(赤ちゃんの足の裏や、手のひらを指で押さえると指を握りしめようとする)
・起立反射・自動歩行反射
(赤ちゃんの腋の下を持って立たせると、足を床につけて起立し、前に傾けると数歩、歩行する)
などの反射があります。
このように体性感覚には
色々な感覚を
受け取る受容器が
たくさんあります
そして 体性感覚の触覚は
胎児が 子宮内での生活で
最初に現れる感覚といわれ
口の周囲から指先などの順に
出現するといわれています
妊娠約7~8週頃では
口元の刺激に対して顔を向け
妊娠 約14週頃では
手を口に持っていき
妊娠 約20週を過ぎると
指しゃぶりが
みられるようになり
満期になると
触覚だけではなく
痛覚、温度覚、圧覚も
備わっていくといわれています
他の感覚の視覚や聴覚は
約24週頃から機能し始めると
いわれているため
生まれてすぐの
赤ちゃんの感覚の中で
最も発達している部分が
体性感覚の触覚になります
このように最初に発達する感覚
触覚は 外界で生活する上で
とても重要な感覚だといえますね
次回は この体性感覚の続きで
体性感覚の伝導路について
書いていきたいと思っております。
皆様のお役に少しでも立てれば幸いです。
【お読み頂きまして ありがとうございました】