というわけで、引き続きこちらのご紹介です!
完全新規造形パーツ「エクステンドハードポイント[W]」が貰える
コトブキヤショップ大型キャンペーンが始動!
ポスター画像↑をご覧いただいたとおり、他シリーズではお馴染みの太っ腹キャンペーンをフレームアームズ&MSGで初開催します。
ポスターと重ねてになりますが、今回は
MSGシリーズ商品も対象。
両シリーズにて対象外商品は現在のところ無し!になります。
ところで
(´・*・)なんで「
2014→2015クライマックスキャンペーン」なん?
という声が聞こえた気がするのでお答えしますと、
2014年末の大型キャンペーンだけど
2015年になっても配れるくらいたくさん作るからみんなたくさん貰いに来てね!
という、決意表明です。
事実
コトブキヤショップキャンペーンは、
特にフレームアームズのものはいつも多目に作っているつもりなのですが
フタを開けると短期決戦になることがしばしばございまして・・・
今回はますます広がる当シリーズに対応出来るほど、
がっつり作って皆様をお待ちします!
さて文章が長くなりましたので、ここからは画像たっぷりでご紹介。

こちらが1セット内容。
左から
メインプレート、ウイング×2、シリンダー、L字接続パーツ、3mm軸×2となっています。
HIPS製で、ランナーにすると並のMSGウェポンユニット1枚分くらいにはなります。
まずは1セットから、こちらの一部を使いまして・・・
小型無人機風に!
メインプレート、ウイング×2、3mm軸×2を使用しています。
これを2セットにすると・・・

着陸脚と垂直翼を追加してより飛行機風に!

さらに2セット分のパーツ全てを使ってみた図。
メインプレートが2倍で推力2倍!
(なお重量も2倍)


3セット分、4セット分と使うとさらに形状を変えられます。
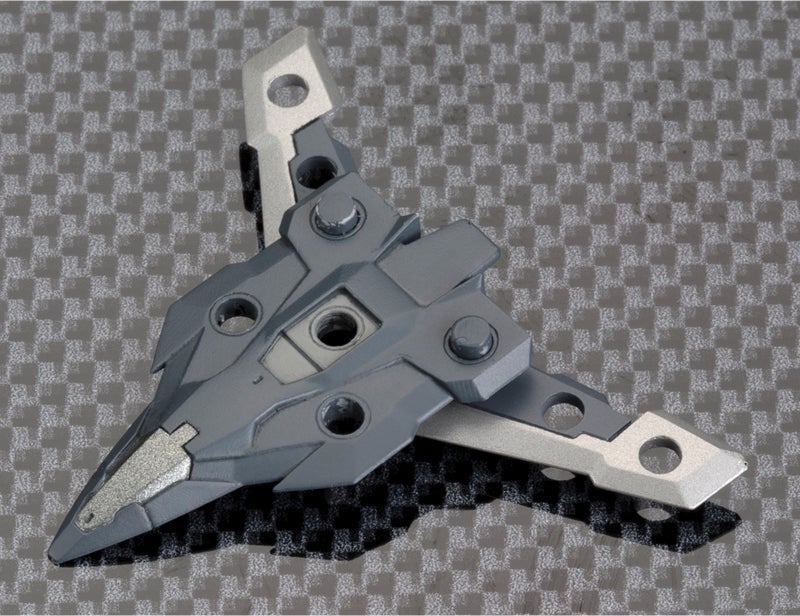
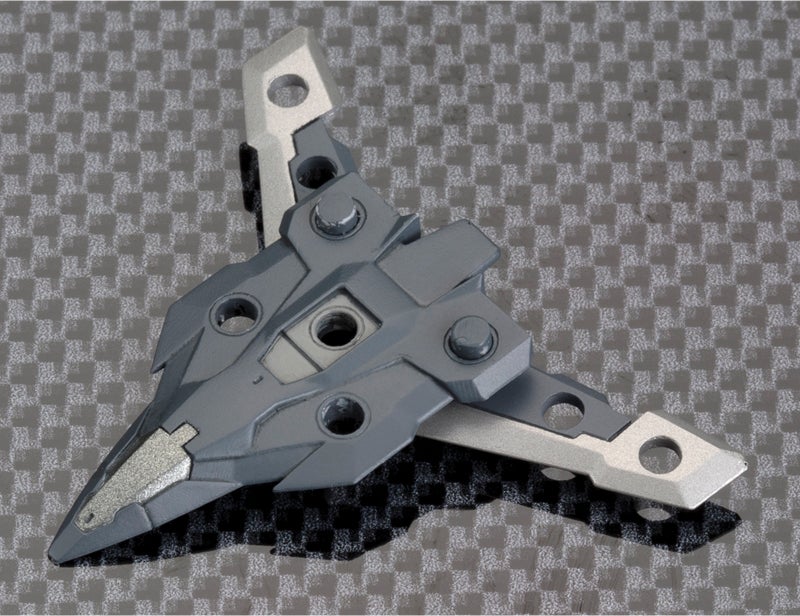
そしてもちろん、飛行機を作るだけがこのパーツの使用法ではなく・・・

2セット分使って
手裏剣!
こちらは↑のポスターでもご紹介した例ですね。

平手に引っ掛ける形でFAに持たせることも可能です。
というわけでここからはスティレット制空部隊仕様と組み合わせて武装的な使い方をご紹介。

鋏型の武器や

さらにウイングを増やして
小型シールドに。
どちらもスティレットやエクステンドアームズ04に付属するグリップパーツや3mm軸でFAに接続が可能!

さらにシリンダーを繋げていくことで
モーニングスター風に。
こちらはシリンダーの数が増える=
セット数が増えるほど延長できます!
もちろん1セットからでも遊べます。

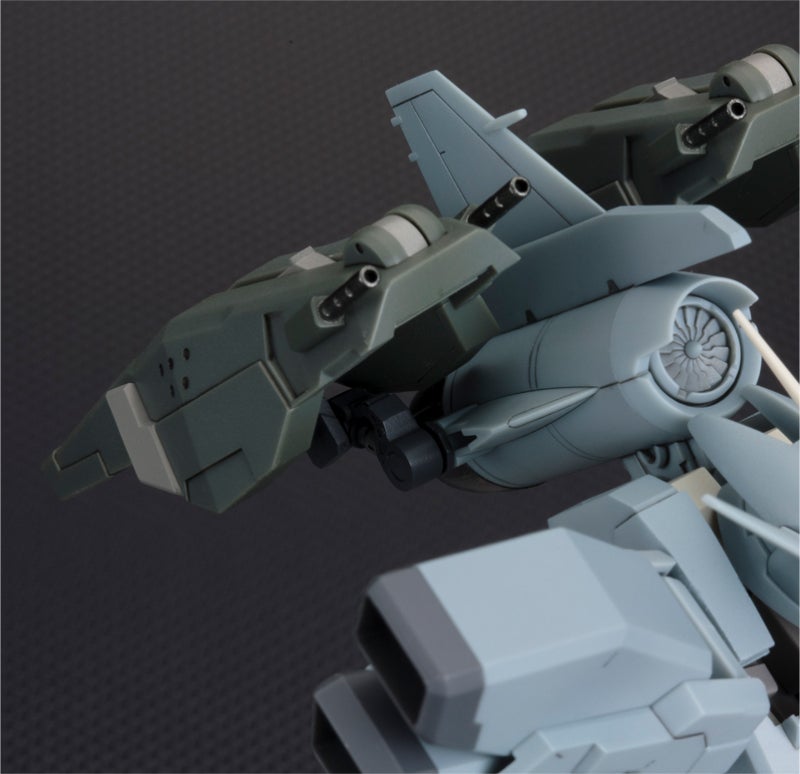
このように組み合わせて・・・

60mmダブルガトリングガン
制空部隊仕様で追加された左腕用ガトリングがあることで左右対称にて再現できます。
面制圧力は向上したが、重量バランスが悪化したため正式採用を見送られた武装、といったところでしょうか。

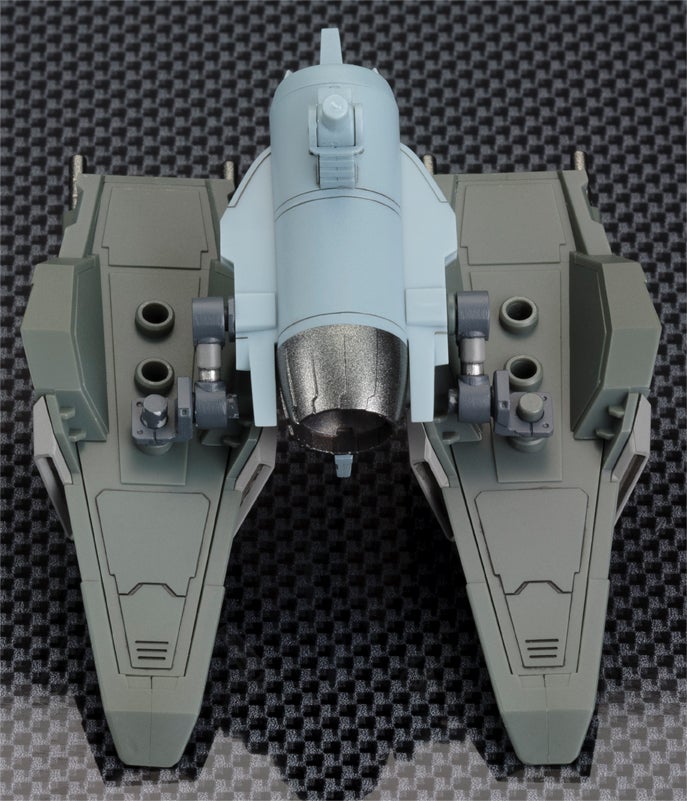
L字接続パーツを使うとこんなことも。
背面のクレイドルを通常の向かい合わせではなく、並行に配置してみました。


こんな具合です。
さらに使用パーツ数を増やしたり、フレームアーキテクトと組み合わせると4枚並行装備も可能かと。
そう、アーキテクトといえば・・・

12,000円ごとに貰える
「フレームアーキテクトTYPE001
エアクラフトカラーVer.」は
スティレット制空部隊仕様と同じ成型色で、さらに
頭部や足のランナーなども付属する、
新カラーのフレームアーキテクトFMEとなっています。
こちらも組み合わせて・・・と言いたいところですが、すでに長くなりましたので(笑)
またサンプルが届いたころにご紹介出来ればと思います。

2014年末から!フレームアームズで!コトブキヤショップが!さらに燃え上がる・・・!
ということで、皆様首を長くしてお待ちいただければと思います。
(´・*・)げんすい