以前、Arduinoでサーボを制御してペンプッタで絵を描かせる実験を行いましたが、IchigoJamにもPWMのアウトプッがあるので実験してみました。
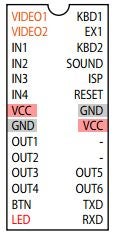
IchigoJamのOUT2~5の4つのポートにPWM波形を出力出来ます。
このPWM波形をサーボのコントロール信号に入れてやると簡単にサーボを制御出来ます。
このPWM波形をサーボのコントロール信号に入れてやると簡単にサーボを制御出来ます。

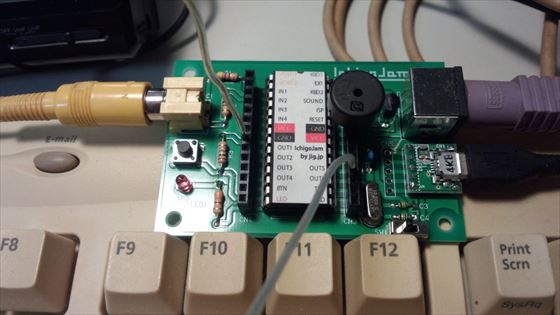
サーボに電池ボックスからプラスとマイナス繋ぎ、マイナスはIchigoJamのGNDにも落としておきます。
命令語は簡単でポート番号とパルス幅、パルス周期(省略時は2000で20ms)を設定するだけです。
PWM 5,60
この命令でOUT5(PWM5)にPWM波形(0.6ms)を出力します。(パルス周期は省略)
ラジコンのサーボはメーカーによって多少異なりますが、概ねパルス幅は0.1~2.0ms、パルス周期は10~20msです。
ラジコンのサーボはメーカーによって多少異なりますが、概ねパルス幅は0.1~2.0ms、パルス周期は10~20msです。
動画のプログラムです。
10 PWM 5,60
20 WAIT 60
30 PWM 5,160
40 WAIT 60
50 GOTO 10
20 WAIT 60
30 PWM 5,160
40 WAIT 60
50 GOTO 10
間の「WAIT 60」で1秒待ちます。
色々と実験してみるとPWM命令とPWM命令の間には「WAIT 2」以上を入れる必要があるようです。「WAIT 1」だとスルーされます。(不安定?)
色々と実験してみるとPWM命令とPWM命令の間には「WAIT 2」以上を入れる必要があるようです。「WAIT 1」だとスルーされます。(不安定?)
PWMポートは4つあるのでロボットアームのコントロールくらいは出来そうです。
IchigoJam画伯の腕前はどんなものでしょう。
IchigoJam画伯の腕前はどんなものでしょう。