着陸目標地点との誤差を100メートル以内とする世界初の「ピンポイント着陸」に成功
月面への着陸に成功した日本の無人探査機「SLIM」についてJAXA=宇宙航空研究開発機構はこれまでに探査機から送られたデータなどから着陸目標地点との誤差を100メートル以内とする世界初の「ピンポイント着陸」に成功したことを発表しましたhttps://t.co/ddrSOX1Apk#nhk_video pic.twitter.com/y7WGvFEIyN
— NHKニュース (@nhk_news) January 25, 2024
日本が探査機を着陸させ、月面で撮影した写真
JUST IN - Photo taken on the Moon after Japan lands its spacecraft pic.twitter.com/XStPRGYOOb
— Insider Paper (@TheInsiderPaper) January 25, 2024
高市大臣「ピンポイント着陸の精度は、障害物回避の直前(高度50m時点)で評価することが適切で、10m程度以下(おそらく3-4m程度)。世界初の快挙を誇りに思います
JAXAが記者会見。日本初の月面着陸に成功したSLIMですが、約1ヶ月かかると言われた着陸分析が早く出来たそうです。
— 高市早苗 (@takaichi_sanae) January 25, 2024
ピンポイント着陸の精度は、障害物回避の直前(高度50m時点)で評価することが適切で、10m程度以下(おそらく3-4m程度)との事。…
月面探査機 JAXA 世界初の「ピンポイント着陸」に成功と発表
1月20日、月面への着陸に成功した日本の無人探査機「SLIM」についてJAXA=宇宙航空研究開発機構はこれまでに探査機から送られたデータなどから着陸目標地点との誤差を100メートル以内とする世界初の「ピンポイント着陸」に成功したことを発表しました。
日本の無人探査機「SLIM」は1月20日未明、世界で5か国目となる月面への着陸に成功しました。
25日、都内で開かれた会見でJAXAはこれまでに探査機から送られたデータなどを詳細に解析した結果探査機は着陸目標地点から東側に55メートルほどの地点に着陸したと推定されることがわかったと明らかにしました。
従来、誤差が数キロメートル単位とされてきた月面着陸で、誤差100メートル以内を目指す世界初の「ピンポイント着陸」に成功したと発表しました。
「SLIM」の機体の撮影に成功

また搭載していた2機の小型の探査ロボットも正常に機能したことが確認され、月面で撮影された画像にはメインエンジンが上を向き、ほぼ鉛直の状態になった「SLIM」の機体が写っています。
この画像では写っていない「SLIM」の画面右側を向いている面に太陽電池パネルが搭載されています。
また、手前にはゴツゴツとした月面の様子が捉えられているほか、両端に見える銀色の物体は「LEV-2」の左右の車輪だということです。
また画像の中央部分に見える灰色やピンクの線はデータが取得できなかった部分を示しているということで、原因を調査中としています。
画像の中央付近に円すい状の形をした物体

これまでの解析で、着陸直前の高度50メートル付近で2基のメインエンジンのうち、1基がなんらかの異常で失われたこともわかりました。
「SLIM」が高度50メートル付近から月面を撮影した画像の中央付近には、円すい状の形をした物体が写っています。
JAXAによりますと、着陸直前になんらかの理由で「SLIM」から落下したメインエンジンのノズル部分とみられるということで、今後、落下の原因については詳しく調査していくとしています。
この影響で想定とは異なる姿勢で月面に着陸したことから探査機に搭載された太陽電池に太陽光があたらず、現時点で発電できていませんが、今後、太陽光があたれば発電する可能性もあるということです。
開発責任者「ピンポイント着陸に関しては100点満点」

「SLIM」の開発責任者、JAXAの坂井真一郎プロジェクトマネージャは
「ピンポイント着陸に関しては100点満点。限られた時間でやるべきことはやりきれた。引き続き復旧運用に向けて全力であたっていきたい」
と話していました。
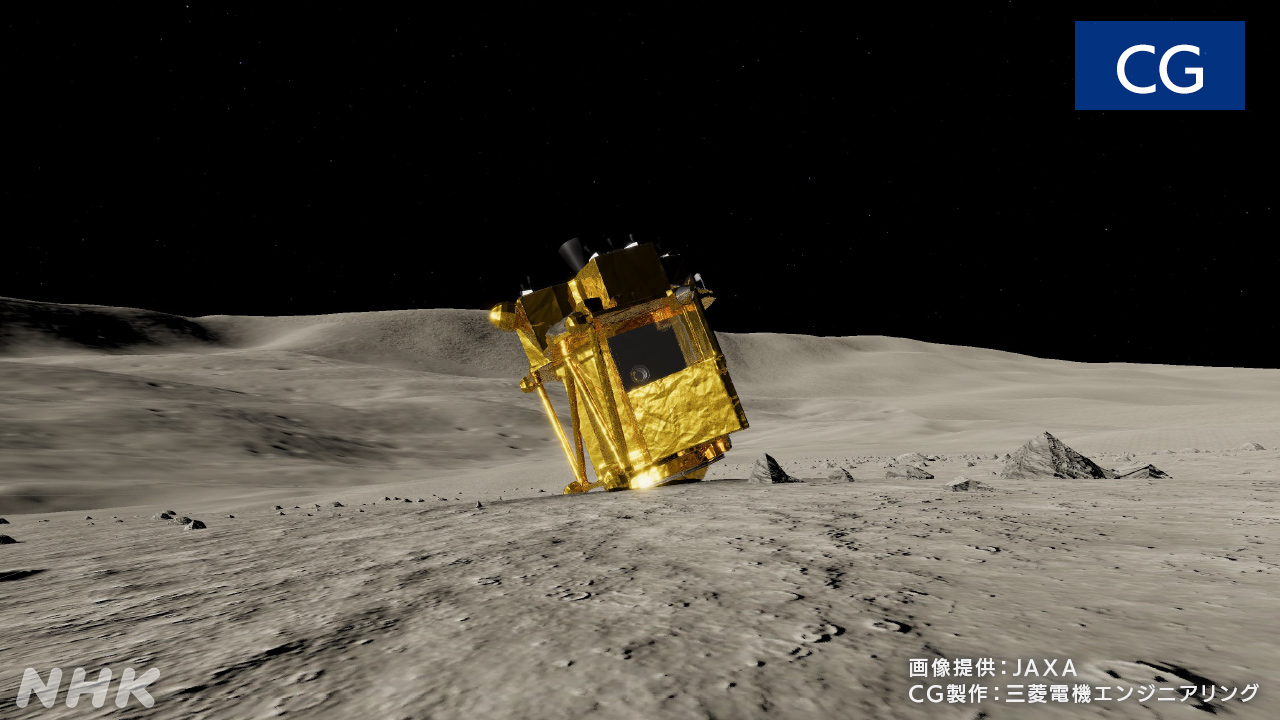
太陽電池パネル 西向きで着陸と考えられる
JAXAが公開した、探査機から送られてきたデータから考えられる、月面での姿勢のCGです。
「SLIM」の太陽電池パネルは着陸後は上を向く計画でしたが、画像では機体が傾いて太陽電池パネルは画像では右側にあたる西方向を向いていて、メインエンジンが上を向いた姿勢で最終的に着陸したと考えられるとしています。
月の日没 2/1ごろまでに太陽光当たれば
JAXAの担当者は月面は昼と夜が2週間ごとに繰り返しており、月の日没にあたる、2月1日ごろまでに太陽電池に太陽光が当たって電力が復旧すれば探査機が自動的に起動して運用を再開できる可能性があると説明しました。
電力が復旧すれば、当初、予定していた月面を撮影し、岩石の組成を調べて月の起源を探る観測を行う予定だということです。
SNSには 技術力の高さ 賞賛の投稿も
世界初の「ピンポイント着陸」に成功したとJAXAが発表したことを受け、SNSでは成功を祝う声や、月面に着陸した機体の姿を捉えた画像を見て技術力の高さを称賛する声が多く投稿されています。
「SLIMよかった!」
「着陸成功オメデト!」
「100m以内に着陸したんだ!すごいな!!」
「ほんとに月面着陸の話してる??ってレベルの精度だった…」
「日本のおもちゃの技術はすごい!」との声も
また、玩具メーカーの「タカラトミー」などがJAXAと共同開発した小型の探査ロボット「LEV-2」が撮影した、月面に着陸したSLIMの機体の画像についても投稿が相次ぎました。
「やべー、この写真は胸熱すぎる!」
「コロンっとひっくり返ってるSLIMの写真、可愛いな」
といった声のほか、「SORA-Q」とも呼ばれ市販もされている「LEV-2」について「日本のおもちゃの技術はすごい!」などと技術力の高さを称賛する声が出されていました。
SORA-Qは直径およそ8センチ、重さ250グラムほどのボールのような形をした小型で軽量なロボットです。
左右の車輪を動かし、砂の上も走行できます。
玩具メーカー「今回の偉業の一翼担えたこと 誇り」
「タカラトミー」は富山幹太郎会長のコメントを発表しました。
「SORA-Qの挑戦について」と題したコメントの中では、
「月着陸実証機SLIMのピンポイント着陸というミッションにおいて、『LEV-2(SORA-Q)』が大きな貢献を果たせた事を大変嬉しく思います。これによりSORA-Qは月面に着陸、撮影した日本最初のロボットになりました」
としています。
そのうえで
「プロジェクトの成功が、世界中の子どもたちが自然科学に対する興味や関心を持つきっかけになることを願うと同時に、難しい事や新しい事に挑戦していく事の大切さと、夢と希望を与え自分自身の未来を創り出す力を信じるきっかけとなることを期待しています。創業100周年を迎えるこの記念の年に、生業である“おもちゃ”の技術が今回の偉業の一翼を担えたことを誇りとし、私たちはこれからも『アソビ発』の新たな挑戦を続けてまいります」
としています。
変形型月面ロボット「ソラキュー」、月面でSLIMの撮影に成功


LEV-2「SORA-Q(ソラキュー)」が撮影・送信した月面画像(JAXA/タカラトミー/ソニーグループ/同志社大学)
JAXAら4者は25日、1月20日0時20分に月面への軟着陸を成功させた小型月着陸実証機「SLIM」において、変形型月面ロボット(LEV-2:愛称SORA-Q)がSLIMの撮影に成功したと発表した。
LEV-2(Lunar Excursion Vehicle 2)は、JAXA(宇宙航空研究開発機構)とタカラトミー、ソニーグループ、同志社大学の4者で共同開発した変形型月面ロボット。LEV-2は超小型月面探査ローバ(LEV-1)とともに、日本初の月面探査ロボットになり、世界初の完全自律ロボットによる月面探査、世界初の複数ロボットによる同時月面探査を達成した。また、LEV-2は世界最小・最軽量の月面探査ロボットとなった。
LEV-2は、LEV-1と共にSLIMに搭載され、SLIM着陸直前に月面へ放出された。その後、LEV-2がSLIMと周辺環境を撮影し、LEV-1の通信機で地上に転送した画像を公開した。
LEV-1・LEV-2間の通信機能が正常に動作したことが確認され、LEV-2が収納状態の球体から変形したことから、SLIMから放出された後に、正常に月面で展開・駆動したことも併せて確認できたという。
加えて、LEV-2が自律制御で、オンボードの光学カメラを使って撮影した複数枚の画像の中から、SLIMが画角内に写っている良質な画像を画像処理アルゴリズムにより選定。送信したこともわかったという。走行ログを含めたその他のデータは解析中で、今後その結果を公表予定としている。