- 前ページ
- 次ページ


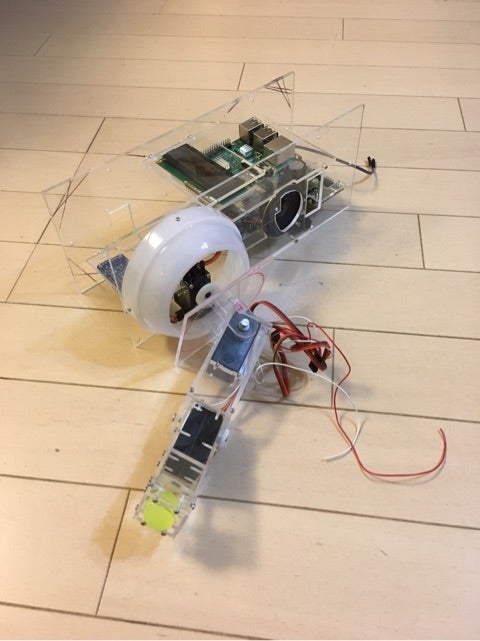
久しぶりのブログです。時間をかけて作って来たnew robotは一旦お休みします。まだ未完成な機能が多すぎて面倒くさくなって来たので、気分転換に余り物を集めて、倒立振子を作ることにしました。材料は意外と揃っていたので、すぐに取りかかれました。I2Cのジャイロセンサが欲しいところだが、3軸加速度センサがあるので、なんとかなると思います。


このロボットのポイントの一つ。厚さ3mmのアクリルに1mmの溝を掘る。そのためにエンドミルを購入。ボール盤に装着。手動のフライス盤が出来た。で多少イビツだけど溝が掘れたので思惑通りの加工が出来た。w