いつか必ず,2足歩行ロボットを自主制作して
一緒に散歩でもしてみたいな~
と思う,天邪鬼g@ppが送る,徒然雑記

onPC 総括&ありがたやw
どうも、g@pp~ほったらかしです。
えぇ~っと、何をやったかっていうと。。。
ほとんど何もしてません。
アンケートに、
『missionそれぞれにどのくらいの時間をかけましたか?(概算で構いません)』
って質問があったので、
背伸びして
『10時間』
と答えてみましたが、、、
提出資料に掲載した内容は、
たぶん、5時間にも満たない気がするのです。。。
内容的には、
Inventor : PCのスペックで撃沈。
MATLAB/Simulink : 当初の予定通り、とりあえずは余裕。
SimMechanics : 使い方を知らなかった&調べる気力がなかった。。。
VirtualReality Toolboxの重さにビビって手をつけれなかった。。。。。
ってことで、新たに試みたことは、ほぼありません。(爆
実は、先週仕事でSimMechanicsに触る機会があったんですが、
やってみると、実は結構簡単で。。。
できなかったのが非常に悔やまれます。。。T_T;
でも、
サイバネットシステムA賞
ってやつを受賞してしまいましたっ!!!
その内容は、、、
書籍「MATLAB/Simlinkによるわかりやすい制御工学」
・・・つまり、
『あんな制御系作ってるようじゃ、てんでダメだから
コレ読んでしっかり勉強しなさいよ!』
ってことですね^^;;
まぁ、古典制御理論でもイチから勉強しなおしますか♪
総括として、
結構楽しかったですゎ!
来年はたぶん参加できないと思いますが、
また機会があれば、ぜひ参加したいっすね☆
それと、本家ROBO-ONEにも、いつか参加できるようにがんばります。
ありがたい賞なんか頂いてしまって、
ホントにありがとうございました。
『The g@pp』の名前が載ってる公式HPはコチラ
では、次からは
ホンモノの製作に戻りたいと思います!
g@ppでした。
ROBO-ONE onPC/Sat.1st 終わりましたぁ~
えぇ~っと、何をやったかっていうと。。。
ほとんど何もしてません。
アンケートに、
『missionそれぞれにどのくらいの時間をかけましたか?(概算で構いません)』
って質問があったので、
背伸びして
『10時間』
と答えてみましたが、、、
提出資料に掲載した内容は、
たぶん、5時間にも満たない気がするのです。。。
内容的には、
Inventor : PCのスペックで撃沈。
MATLAB/Simulink : 当初の予定通り、とりあえずは余裕。
SimMechanics : 使い方を知らなかった&調べる気力がなかった。。。
VirtualReality Toolboxの重さにビビって手をつけれなかった。。。。。
ってことで、新たに試みたことは、ほぼありません。(爆
実は、先週仕事でSimMechanicsに触る機会があったんですが、
やってみると、実は結構簡単で。。。
できなかったのが非常に悔やまれます。。。T_T;
でも、
サイバネットシステムA賞
ってやつを受賞してしまいましたっ!!!
その内容は、、、
書籍「MATLAB/Simlinkによるわかりやすい制御工学」
・・・つまり、
『あんな制御系作ってるようじゃ、てんでダメだから
コレ読んでしっかり勉強しなさいよ!』
ってことですね^^;;
まぁ、古典制御理論でもイチから勉強しなおしますか♪
総括として、
結構楽しかったですゎ!
来年はたぶん参加できないと思いますが、
また機会があれば、ぜひ参加したいっすね☆
それと、本家ROBO-ONEにも、いつか参加できるようにがんばります。
ありがたい賞なんか頂いてしまって、
ホントにありがとうございました。
『The g@pp』の名前が載ってる公式HPはコチラ
では、次からは
ホンモノの製作に戻りたいと思います!
g@ppでした。
終わらないですよ。。。
まずい。
進まない。
とりあえず、週末使って地元に帰ってました。
北海道は雪でした。
ちょっと前から、サーボを変えてやってみようと考えてみて
KONDOのKRS-4024で軽く作ってみました。
ホントにかる~く↓

全くサイズが収まる気がしません。
(まぁ、↑のやつは軸構成も全く考えてないんで、
収まる筈はないんですがね。。。)
ってことで、↑のやつは記念に残しておくってことで、
やっぱり元のサーボを使ってがんばりますです。
みなさん、進んでるのかな。。。
進まない。
とりあえず、週末使って地元に帰ってました。
北海道は雪でした。
ちょっと前から、サーボを変えてやってみようと考えてみて
KONDOのKRS-4024で軽く作ってみました。
ホントにかる~く↓

全くサイズが収まる気がしません。
(まぁ、↑のやつは軸構成も全く考えてないんで、
収まる筈はないんですがね。。。)
ってことで、↑のやつは記念に残しておくってことで、
やっぱり元のサーボを使ってがんばりますです。
みなさん、進んでるのかな。。。
Simmechanics・・・これも重い。。。
MATLAB借用ライセンスきたおーーー!!!
☆第1報☆
↓やったこと↓
1.インスコ。
2.起動。
ちと重い。
3.とりあえず、いつもの配色に変更。
4.とりあえず、【ver】と打ってみる。

スゲー!!!!
なまら色々入ってるっ!!!
楽しいね、こりゃ。
5.昔作ったモデルでSimulinkの動作確認。
うん、普通に動いて安心。
6.Simmechanicsのデモを動作させてみる。
おい、重いぞ。
・・・とまぁ、第1報ってことでした。
先が思いやられるな。。。
☆第1報☆
↓やったこと↓
1.インスコ。
2.起動。
ちと重い。
3.とりあえず、いつもの配色に変更。
4.とりあえず、【ver】と打ってみる。

スゲー!!!!
なまら色々入ってるっ!!!
楽しいね、こりゃ。
5.昔作ったモデルでSimulinkの動作確認。
うん、普通に動いて安心。
6.Simmechanicsのデモを動作させてみる。
おい、重いぞ。
・・・とまぁ、第1報ってことでした。
先が思いやられるな。。。
onPC参加します。
どもです、どもです。
ご無沙汰です。
onPC!なんてカテゴリを作ってしまいました。
さてさて、普通に宣言します。
【ROBO-ONE onPC / Sat. 1st】に参戦します。
(HPはコチラ )
おそらく、ミッションなんてまともにクリアできないと思いますが、
今の僕にできる限りの力で、がんばります。
よろしくお願いいたします。
今までの進捗状況をお伝えしますと・・・
○Inventorをインスコしました。
かなりしっかりした3DCADソフトです。
ちなみに、PCの推奨スペックはコチラ (※PDFです)
---(ここから要約)---
推奨スペック
CPU: Pentium 4 3.0GB以上
メモリ: 3GB以上
HDD: 3.5GB以上の空き容量
---(ここまで要約)---
・・・アホかと。
HDDは結構使うんやね。。。程度の印象だけど、
CPUは。。。最近の良いマシンならクリアできるのかな。。。
メモリは。。。個人でこんなマシン持ってる人いるんでしょうか!?
そんなん無理っすわ。
(まぁ、個人で買うようなことを想定してるソフトじゃないんで、いいんですけどね。。。)
ってことで、自分のPCのスペック公開
CPU: Duron 950MHz (AMD)
メモリ: 512MB
HDD: 20GB空き (トータル50GBくらい)
本気でデルコンあたりを買おうか考えました。。。
金銭的に無理でした。。。orz
ってことで、このスペックで戦っていきます。
○メカ構成を妄想
たぶん今回、ネックになるのがサイズと質量。
そして、上記を満たしながら30Gに耐える構造。
というわけで、ロボットの全体構成を妄想していました。
サーボの選定がかなり重要になってきそうなので、のんびり選んでました。
あと、角速度を抑える手段。
以前のミッションでは、スラスター(推力発生装置)を使ってたみたいですが、
今回は。。。使っていいのかな?
とりあえず、今回のミッションでは、スラスターなしでもいけそうなので
ナシで行ってみます。
【リアクションホイール】でしたっけ?
ジャイロちっくなコマを仕込んでみようと思います。
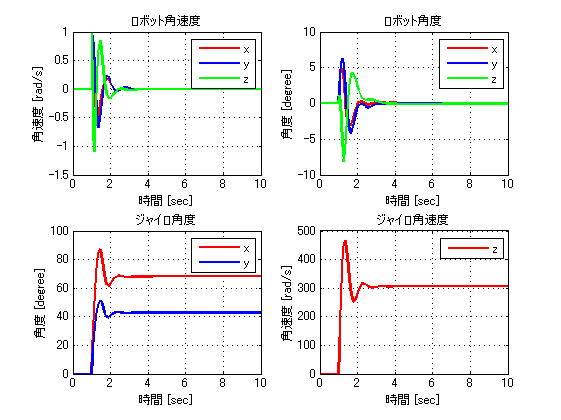
○制御系を妄想
なぜか、たまたま、MATらぶを使用できる環境にあるので、
しみゅリンク使って超簡単なロボットのモデル(直方体で質量だけ1kgにしたもの)を
使って角速度を抑えるシミュレーションをしてみました。
これでうまくいってから設計をしようかな~と思ったので。
予想以上に時間がかかってしまいましたが、なんとかなりそうです。
いちおう、結果はコチラ↓
1[s]にロボット角速度をステップ状に1を入力しています。

えぇ~っと、ネタバレするので、よく見ないでください。
何かをパクっていただいても構いませんが、何も保証しません。
古典制御ってやつです。
PIDブロックを6個くらい使ってしまいました。
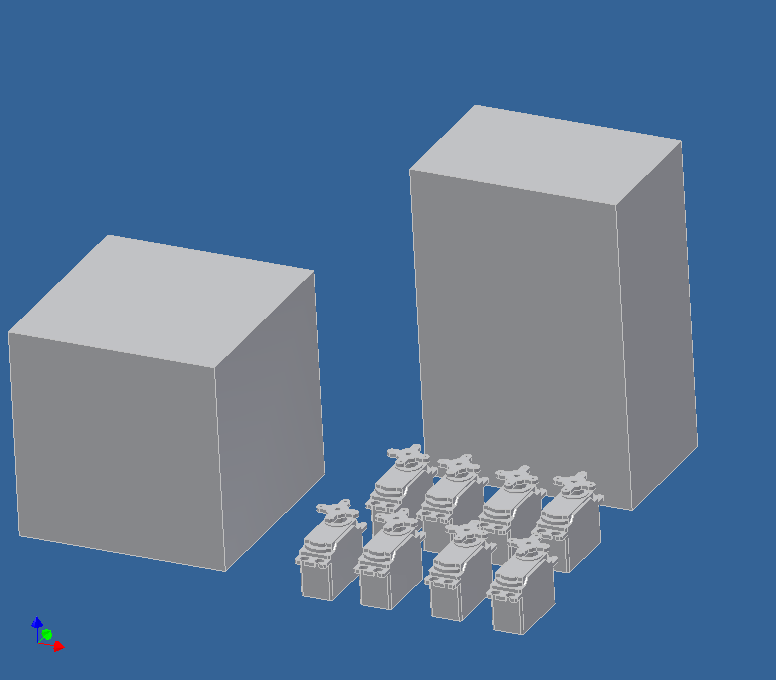
○メカを作りはじめる。
再びInventorに戻って設計を始めたのが、ついさっき。
あらあら、出遅れてますね。
とりあえず、予定しているRobot Labsのサーボを超テキトーに書いてみました。
さらに、1000cm^3の箱と一緒にならべてみました。

・・・これ、16軸も入らねぇだろっ!!
まぁ、ここら辺は、今後がんばっていきますよ。
さて、長くなってしまいました。
これを読んで何か得する方は、まずいないでしょう。
備忘録なんで。
では、
ぐっばいマルコフ。
ご無沙汰です。
onPC!なんてカテゴリを作ってしまいました。
さてさて、普通に宣言します。
【ROBO-ONE onPC / Sat. 1st】に参戦します。
(HPはコチラ )
おそらく、ミッションなんてまともにクリアできないと思いますが、
今の僕にできる限りの力で、がんばります。
よろしくお願いいたします。
今までの進捗状況をお伝えしますと・・・
○Inventorをインスコしました。
かなりしっかりした3DCADソフトです。
ちなみに、PCの推奨スペックはコチラ (※PDFです)
---(ここから要約)---
推奨スペック
CPU: Pentium 4 3.0GB以上
メモリ: 3GB以上
HDD: 3.5GB以上の空き容量
---(ここまで要約)---
・・・アホかと。
HDDは結構使うんやね。。。程度の印象だけど、
CPUは。。。最近の良いマシンならクリアできるのかな。。。
メモリは。。。個人でこんなマシン持ってる人いるんでしょうか!?
そんなん無理っすわ。
(まぁ、個人で買うようなことを想定してるソフトじゃないんで、いいんですけどね。。。)
ってことで、自分のPCのスペック公開
CPU: Duron 950MHz (AMD)
メモリ: 512MB
HDD: 20GB空き (トータル50GBくらい)
本気でデルコンあたりを買おうか考えました。。。
金銭的に無理でした。。。orz
ってことで、このスペックで戦っていきます。
○メカ構成を妄想
たぶん今回、ネックになるのがサイズと質量。
そして、上記を満たしながら30Gに耐える構造。
というわけで、ロボットの全体構成を妄想していました。
サーボの選定がかなり重要になってきそうなので、のんびり選んでました。
あと、角速度を抑える手段。
以前のミッションでは、スラスター(推力発生装置)を使ってたみたいですが、
今回は。。。使っていいのかな?
とりあえず、今回のミッションでは、スラスターなしでもいけそうなので
ナシで行ってみます。
【リアクションホイール】でしたっけ?
ジャイロちっくなコマを仕込んでみようと思います。
○制御系を妄想
なぜか、たまたま、MATらぶを使用できる環境にあるので、
しみゅリンク使って超簡単なロボットのモデル(直方体で質量だけ1kgにしたもの)を
使って角速度を抑えるシミュレーションをしてみました。
これでうまくいってから設計をしようかな~と思ったので。
予想以上に時間がかかってしまいましたが、なんとかなりそうです。
いちおう、結果はコチラ↓
1[s]にロボット角速度をステップ状に1を入力しています。
えぇ~っと、ネタバレするので、よく見ないでください。
何かをパクっていただいても構いませんが、何も保証しません。
古典制御ってやつです。
PIDブロックを6個くらい使ってしまいました。
○メカを作りはじめる。
再びInventorに戻って設計を始めたのが、ついさっき。
あらあら、出遅れてますね。
とりあえず、予定しているRobot Labsのサーボを超テキトーに書いてみました。
さらに、1000cm^3の箱と一緒にならべてみました。
・・・これ、16軸も入らねぇだろっ!!
まぁ、ここら辺は、今後がんばっていきますよ。
さて、長くなってしまいました。
これを読んで何か得する方は、まずいないでしょう。
備忘録なんで。
では、
ぐっばいマルコフ。
CPU=Duronですけど、何か?
いやー。。。
大きく出遅れましたが。。。
入れました。
標準スペックにすら、遠ぉぉぉぉぉぉ~く及ばない
わがPCのスペック。
解析とか動くのかしら。。。
そのためにPC導入した方もいらっしゃるようで。。。
まぁ、なんとか、やれるところまでやってみましょうよ。
がんばれ、Inventor
Matlab/Simulinkを使えるのが、唯一の救い。
SimMechanics~早く遊びたいなぁ~
ホントに、右も左もわからないまま、
模索しながら発進します。
onPC。
大きく出遅れましたが。。。
入れました。
標準スペックにすら、遠ぉぉぉぉぉぉ~く及ばない
わがPCのスペック。
解析とか動くのかしら。。。
そのためにPC導入した方もいらっしゃるようで。。。
まぁ、なんとか、やれるところまでやってみましょうよ。
がんばれ、Inventor
Matlab/Simulinkを使えるのが、唯一の救い。
SimMechanics~早く遊びたいなぁ~
ホントに、右も左もわからないまま、
模索しながら発進します。
onPC。
シリアル通信してみました。
どもです。g@ppです。
以前に書いたとおりですが、
GCC Developer Lite (GDL)において
H8/3664をH8/3694用の環境でコンパイル・実行しております。
今までは、この影響は出たことがないんですが、遂にでました。
そもそも、H8/3664とH8/3694の違いってなんですか?
一番大きな違いは、CPUのクロック数。
3664 ⇒ 16MHz
3694 ⇒ 20MHz
つまり、3694の方が早いってこと。
他にも違うところはあるらしいんですが、よく知りません(爆
んで、今回やったことは・・・
なんて言うんでしょうか??
スムージング処理とでも言うんでしょうか!?
サーボの目標値までの移動をコマ割りにして補間するやつです。
んで、数日前に書いてみたものの。。。
なぜか予想外の動きをするわけです。
2つの目標値を往復するだけなのに。。。
こりゃ困った、どうしよう!?
ってことで、シリアル通信を使ってデバッグすることにしたんです。
そしたら。。。
文字化けしまくり orz
いくらやってもダメなのです。
さんざん悩んだあげく、たどり着いたのが【ボーレート】という言葉。
-------ここから引用---------
ボーレートとは、モデムを使用して通信したときの変調速度の単位のことである。1秒間でかけられる変調の回数を表す。
現在のモデムでは通信するのに、位相が異なる2N個の信号点を規定する変調方式を採用する。それゆえ、波長の1サイクルでNビットのデータを表現できることになる。
そのためデータ伝送速度をNで割ると変調速度が分かることになる。例えば、14.4kbpsのモデムではN=6になっているため、14400/6=2400であるから、このとき変調速度は2400ボーとなる。
1つのシンボルで1ビットの情報を伝送する際は、シンボル速度と伝送速度が一致するため、かつては速度を表す単位としてボーが誤用されていたが、現在主流の高速モデムは、複数ビットを1つのシンボルに割り当てているので、これらの値は一致しないことになる。
なお、ボーレートとよく似た単位にbps(bits per second)があるが、こちらは1秒間に伝送できるデータの量をビット数で表している。
-------ここまで引用---------
わかるかい!ボケっ!!!!
要するに、上で述べたように、CPUの速度が違うから転送速度が違うってこと!?
送受信の通信速度が合わないから文字化けしちゃうってこと!?
今のところ、そう理解しました。
んで、ここから対処法↓
【3694.h】の680行目あたりに記述してある
ボーレートの設定リストを書き換えてやりましょう。
/_/_/_/_/_/_/_/_/_/_/_/【変更前】_/_/_/_/_/_/_/_/_/_/_/_/_/_/_/_/
/*--------------------------------------------------------------*/
/* シリアル通信関数(FIFOバッファ付) */
/*--------------------------------------------------------------*/
typedef enum { // ボーレート設定リスト
br4800 = 129,
br9600 = 64,
br19200 = 32,
br31250 = 19,
br38400 = 15,
br57600 = 10
} TBaudRate;
をこのように↓↓↓↓
/_/_/_/_/_/_/_/_/_/_/_/【変更後】_/_/_/_/_/_/_/_/_/_/_/_/_/_/_/_/
typedef enum { // ボーレート設定リスト
/* br4800 = 129,
br9600 = 64,
br19200 = 32,
br31250 = 19,
br38400 = 15,
br57600 = 10*/ //3694用(20MHz)
br2400 = 207,
br4800 = 103,
br9600 = 51,
br19200 = 25,
br31250 = 15,
br38400 = 12,
br57600 = 8 //3664用(16MHz)
} TBaudRate;
変更してみました。
以前の設定は一応、コメントアウトして残しておきました。
全てのレートを試したわけじゃないですが、メインで使ってるあたりは使えそうでした。
やっとシリアル通信ができるようになりました。やれやれ。。。
んで、本題のデバッグ。。。
なんのことはなく、
_WORD(unsigned short)で宣言していた変数にマイナスを代入してアンダーフローしてたみたいです。
やれやれ。。。
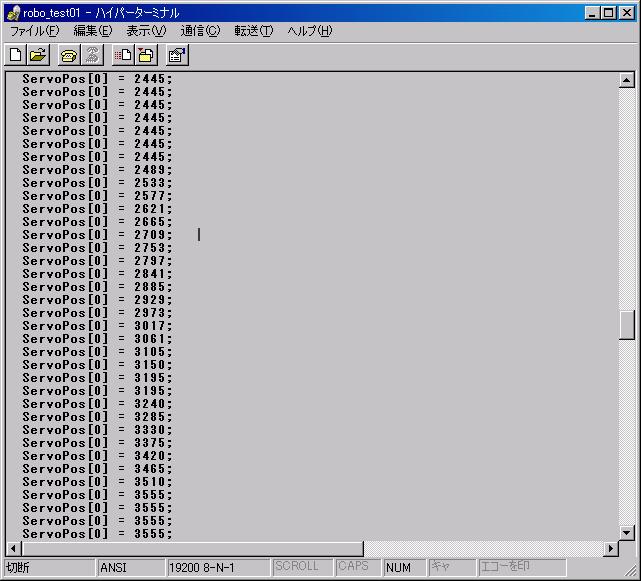
ふぅ。
さぁ、本日の最終形はコチラ↓

20[msec]が25コマで0.5秒。0.5秒で目標値まで移動するようになってます。
目標値は2445~3555にしてあります。
ちなみにこのコマ数は簡単に変更可能です☆
さて、次は。。。ハードかな??
以前に書いたとおりですが、
GCC Developer Lite (GDL)において
H8/3664をH8/3694用の環境でコンパイル・実行しております。
今までは、この影響は出たことがないんですが、遂にでました。
そもそも、H8/3664とH8/3694の違いってなんですか?
一番大きな違いは、CPUのクロック数。
3664 ⇒ 16MHz
3694 ⇒ 20MHz
つまり、3694の方が早いってこと。
他にも違うところはあるらしいんですが、よく知りません(爆
んで、今回やったことは・・・
なんて言うんでしょうか??
スムージング処理とでも言うんでしょうか!?
サーボの目標値までの移動をコマ割りにして補間するやつです。
んで、数日前に書いてみたものの。。。
なぜか予想外の動きをするわけです。
2つの目標値を往復するだけなのに。。。
こりゃ困った、どうしよう!?
ってことで、シリアル通信を使ってデバッグすることにしたんです。
そしたら。。。
文字化けしまくり orz
いくらやってもダメなのです。
さんざん悩んだあげく、たどり着いたのが【ボーレート】という言葉。
-------ここから引用---------
ボーレートとは、モデムを使用して通信したときの変調速度の単位のことである。1秒間でかけられる変調の回数を表す。
現在のモデムでは通信するのに、位相が異なる2N個の信号点を規定する変調方式を採用する。それゆえ、波長の1サイクルでNビットのデータを表現できることになる。
そのためデータ伝送速度をNで割ると変調速度が分かることになる。例えば、14.4kbpsのモデムではN=6になっているため、14400/6=2400であるから、このとき変調速度は2400ボーとなる。
1つのシンボルで1ビットの情報を伝送する際は、シンボル速度と伝送速度が一致するため、かつては速度を表す単位としてボーが誤用されていたが、現在主流の高速モデムは、複数ビットを1つのシンボルに割り当てているので、これらの値は一致しないことになる。
なお、ボーレートとよく似た単位にbps(bits per second)があるが、こちらは1秒間に伝送できるデータの量をビット数で表している。
-------ここまで引用---------
わかるかい!ボケっ!!!!
要するに、上で述べたように、CPUの速度が違うから転送速度が違うってこと!?
送受信の通信速度が合わないから文字化けしちゃうってこと!?
今のところ、そう理解しました。
んで、ここから対処法↓
【3694.h】の680行目あたりに記述してある
ボーレートの設定リストを書き換えてやりましょう。
/_/_/_/_/_/_/_/_/_/_/_/【変更前】_/_/_/_/_/_/_/_/_/_/_/_/_/_/_/_/
/*--------------------------------------------------------------*/
/* シリアル通信関数(FIFOバッファ付) */
/*--------------------------------------------------------------*/
typedef enum { // ボーレート設定リスト
br4800 = 129,
br9600 = 64,
br19200 = 32,
br31250 = 19,
br38400 = 15,
br57600 = 10
} TBaudRate;
をこのように↓↓↓↓
/_/_/_/_/_/_/_/_/_/_/_/【変更後】_/_/_/_/_/_/_/_/_/_/_/_/_/_/_/_/
typedef enum { // ボーレート設定リスト
/* br4800 = 129,
br9600 = 64,
br19200 = 32,
br31250 = 19,
br38400 = 15,
br57600 = 10*/ //3694用(20MHz)
br2400 = 207,
br4800 = 103,
br9600 = 51,
br19200 = 25,
br31250 = 15,
br38400 = 12,
br57600 = 8 //3664用(16MHz)
} TBaudRate;
変更してみました。
以前の設定は一応、コメントアウトして残しておきました。
全てのレートを試したわけじゃないですが、メインで使ってるあたりは使えそうでした。
やっとシリアル通信ができるようになりました。やれやれ。。。
んで、本題のデバッグ。。。
なんのことはなく、
_WORD(unsigned short)で宣言していた変数にマイナスを代入してアンダーフローしてたみたいです。
やれやれ。。。
ふぅ。
さぁ、本日の最終形はコチラ↓
20[msec]が25コマで0.5秒。0.5秒で目標値まで移動するようになってます。
目標値は2445~3555にしてあります。
ちなみにこのコマ数は簡単に変更可能です☆
さて、次は。。。ハードかな??
ROBOlep
どうも、
【天邪鬼 ロボット】でgoogle検索したら、トップに出ました。g@ppです。
情報は、常にチェックしておかなければなりませんね。。。
ロボット専門ポータルサイト:ROBOlep
Q : ROBOlepとは何ですか?
A : あらゆるロボットジャンルをカバーした究極のロボットポータルサイトです。最新情報チェックから、ロボットファンがたくさん集まるソーシャルネットワーク型コミュニティへの参加、オンラインショッピングなどをご利用いただけます。
・・・恥ずかしながら、まったく知りませんでした。
とりあえず、登録してみました。
お約束のBLOGも自動的についてくるみたいなのですが、
どっちをメインになるかは今後の展開で考えていきます。
ソーシャルネットワーク型コミュニティ・・・・
・・・どっかで聞いたやつですね。
足あと機能とかついちゃって、どっかのSNSみたいですが。。。
しばらく使ってみて、続けるかどうか考えてみようと思います。
ロボットに興味がある人は、のぞいてみると楽しいと思います。
某有名な方(もちろんロボット系でね。)も参加されているようですし。
登録者数は、まだ200人ちょっとみたいです。
このROBOlepが今後どういう風に展開していくか!?
そこに、ロボット文化の未来を垣間見てみようと思います。
ってことで、明日も仕事がんばります。
おやすみなさい。
【天邪鬼 ロボット】でgoogle検索したら、トップに出ました。g@ppです。
情報は、常にチェックしておかなければなりませんね。。。
ロボット専門ポータルサイト:ROBOlep
Q : ROBOlepとは何ですか?
A : あらゆるロボットジャンルをカバーした究極のロボットポータルサイトです。最新情報チェックから、ロボットファンがたくさん集まるソーシャルネットワーク型コミュニティへの参加、オンラインショッピングなどをご利用いただけます。
・・・恥ずかしながら、まったく知りませんでした。
とりあえず、登録してみました。
お約束のBLOGも自動的についてくるみたいなのですが、
どっちをメインになるかは今後の展開で考えていきます。
ソーシャルネットワーク型コミュニティ・・・・
・・・どっかで聞いたやつですね。
足あと機能とかついちゃって、どっかのSNSみたいですが。。。
しばらく使ってみて、続けるかどうか考えてみようと思います。
ロボットに興味がある人は、のぞいてみると楽しいと思います。
某有名な方(もちろんロボット系でね。)も参加されているようですし。
登録者数は、まだ200人ちょっとみたいです。
このROBOlepが今後どういう風に展開していくか!?
そこに、ロボット文化の未来を垣間見てみようと思います。
ってことで、明日も仕事がんばります。
おやすみなさい。
ブラケット その2
今回もハード編です。
昨日の日曜の午後に、寮の娯楽室(作業部屋!?)で
シコシコ作ってみました。
ってことで、
まだ途中経過ながら、こんな感じとなりました。
↓↓↓↓↓
↓↓↓↓↓
↓↓↓↓↓↓↓↓↓↓↓
↓↓↓↓↓↓↓
↓↓↓
↓

土曜日からさほど進んでませんが。。。
まぁ、のんびりやるのが好きなので許してください。
まだまだですけど、
少しずつ形が見えてきそうです☆

あ~ぁ、楽しみです♪
----------
ちょっと嬉しい話:
日曜に同期と飲んでたときに、
「ロボットとか電子工作とか制御とかキャタピラとか作ってみたい」
っていう同期がいました☆
んで、もしおいらで少しでも教えられることがあれば協力しますよっ♪
ってことになって、
一緒にやることになるかもしれないっす♪♪
こういうのを自作するのは楽しいんですよ!!みなさん!!!
この楽しみを共有できる人がたくさん増えるとイイナと思ってます☆
いえ、いいんですよ、オタクで。
でわ。
昨日の日曜の午後に、寮の娯楽室(作業部屋!?)で
シコシコ作ってみました。
ってことで、
まだ途中経過ながら、こんな感じとなりました。
↓↓↓↓↓
↓↓↓↓↓
↓↓↓↓↓↓↓↓↓↓↓
↓↓↓↓↓↓↓
↓↓↓
↓

土曜日からさほど進んでませんが。。。
まぁ、のんびりやるのが好きなので許してください。
まだまだですけど、
少しずつ形が見えてきそうです☆

あ~ぁ、楽しみです♪
----------
ちょっと嬉しい話:
日曜に同期と飲んでたときに、
「ロボットとか電子工作とか制御とかキャタピラとか作ってみたい」
っていう同期がいました☆
んで、もしおいらで少しでも教えられることがあれば協力しますよっ♪
ってことになって、
一緒にやることになるかもしれないっす♪♪
こういうのを自作するのは楽しいんですよ!!みなさん!!!
この楽しみを共有できる人がたくさん増えるとイイナと思ってます☆
いえ、いいんですよ、オタクで。
でわ。
サーボブラケット!?
いや~ご無沙汰です。
8月は投稿ゼロですって。
困ったもんです。
サボってたわけじゃありません。
(いや、結構サボってましたか。。。)
サーボブラケットなるものを思索して、試作しました。
サーボブラケットってなんですか?
サーボモータを固定するやつです。
こんなんです。
サーボブランケットじゃなくて、ブラケットなんでお間違いなく。
あくまで試作なので、
加工とかスゲーぐだぐだです。勘弁。
とりあえず写真を↓

1ミリ厚のアルミです。
本当は1.5ミリぐらいで作りたいんですが、
我が家にある道具で作るには、非常に難しいんです。。。
これでダメだったときに考えましょう。
もっと剛性を上げなきゃとは思うんですが、あくまで試作なので。←コレばっか。
今のところスムーズに動いてくれそうな雰囲気なので、ヨシとしましょう。
こんなんをつなぎ合わせると、ロボットちゃんができちゃうわけですね~
楽しいですねぇ~
明日も時間が取れそうなので、続きをのんびり作ってみようと思います。
ではでは、また来月!(反省ゼロ
8月は投稿ゼロですって。
困ったもんです。
サボってたわけじゃありません。
(いや、結構サボってましたか。。。)
サーボブラケットなるものを思索して、試作しました。
サーボブラケットってなんですか?
サーボモータを固定するやつです。
こんなんです。
サーボブランケットじゃなくて、ブラケットなんでお間違いなく。
あくまで試作なので、
加工とかスゲーぐだぐだです。勘弁。
とりあえず写真を↓

1ミリ厚のアルミです。
本当は1.5ミリぐらいで作りたいんですが、
我が家にある道具で作るには、非常に難しいんです。。。
これでダメだったときに考えましょう。
もっと剛性を上げなきゃとは思うんですが、あくまで試作なので。←コレばっか。
今のところスムーズに動いてくれそうな雰囲気なので、ヨシとしましょう。
こんなんをつなぎ合わせると、ロボットちゃんができちゃうわけですね~
楽しいですねぇ~
明日も時間が取れそうなので、続きをのんびり作ってみようと思います。
ではでは、また来月!(反省ゼロ